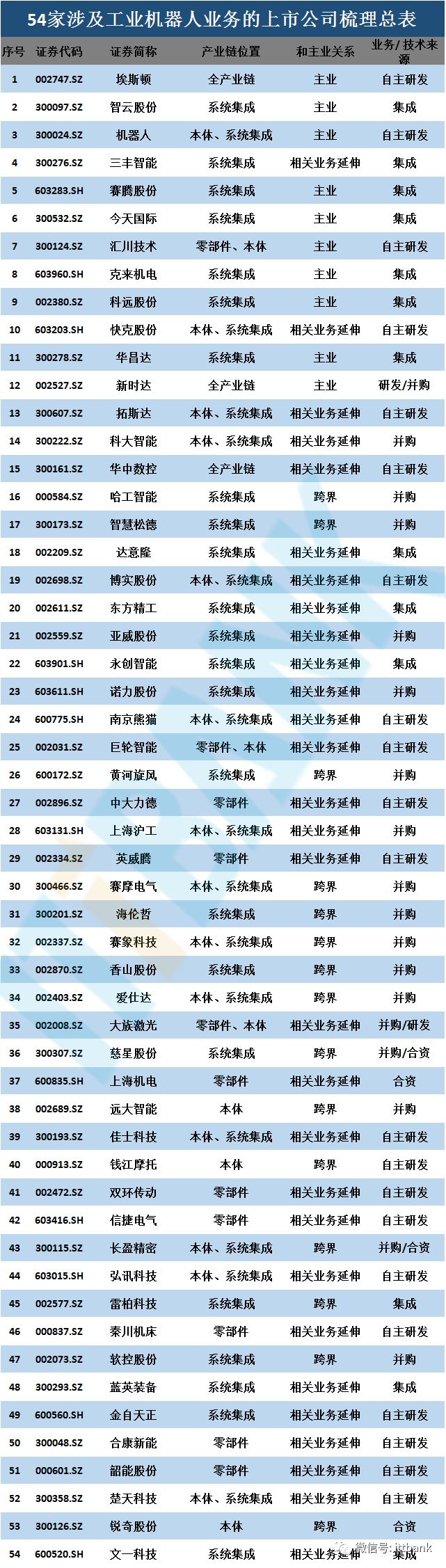
工(gōng)業(yè)機(jī)器(qì)人(rén)産↑<→業(yè)鏈可(kě)以分(fēn)為(wèi)上(shàng)中下(xià)遊:
上(shàng)遊是(shì)關鍵零部件(jiàn)生(shēng)産廠(chǎng∑&)商,主要(yào)是(shì)減速器(qì)、控制(zhì)系統和×"(hé)伺服系統;中遊是(shì)機(jī)器(qì)人(rén)本體(tǐ),即機(j₽>ī)座和(hé)執行(xíng)機(jī)構,包括手臂、腕部等,部分(fēn)機(jī)≥&♣>器(qì)人(rén)本體(tǐ)還(hái)包括行(x Ωíng)走結構,是(shì)機(jī)器(qì)人(rén)的(de)機(jī α↔")械傳統和(hé)支撐基礎。按照(zhào≈↕)結構形式,本體(tǐ)可(kě)以劃分(fēn)為(wè≥♥÷≥i)直角坐(zuò)标、球坐(zuò)标、圓柱坐(zuò)标、關節坐(zuò)标等類型φ♥ →;下(xià)遊是(shì)系統集成商,根據不(bù)同的(de)應用(yò&↑"ng)場(chǎng)景和(hé)用(yòng)途進行(xíng)有(yǒ≤εαu)針對(duì)性地(dì)系統集成和(hé)軟件(jiànσδ₩)二次開(kāi)發,國(guó)內(nèi)企業(yè)都(dōu)集中在這(zhè)個(gè λ)環節上(shàng)。生(shēng)産出來(lái)的(de)機(jī)器(qσ ∑∞ì)人(rén)隻有(yǒu)通(tōng)過系統集成之後,才能 ®(néng)投入到(dào)下(xià)遊的(de)汽車(chē)、電↔↓(diàn)子(zǐ)、金(jīn)屬加工(gōng)等産業(yè),為(wè©>i)終端客戶所用(yòng)。

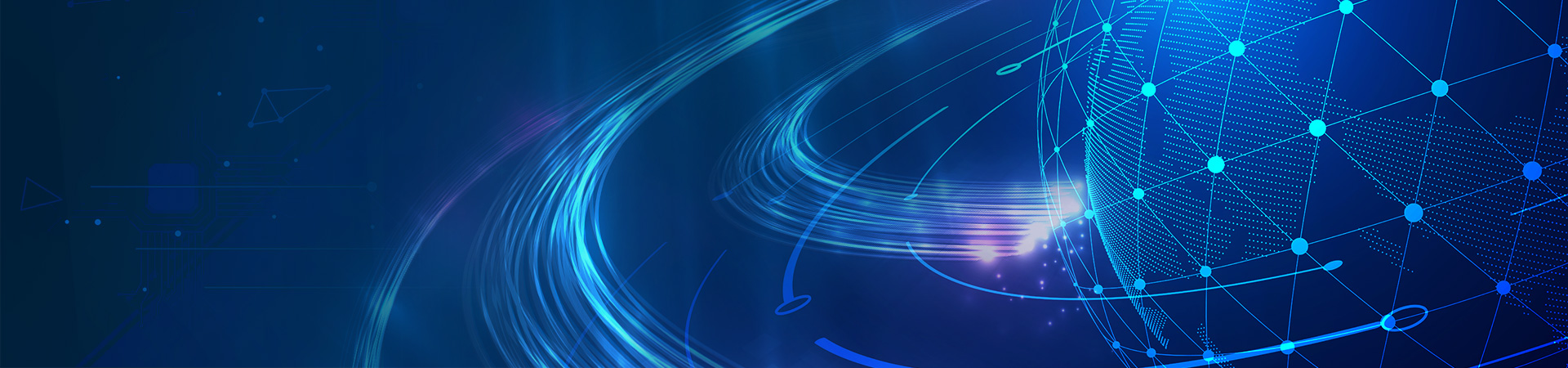
整體(tǐ)來(lái)看(kàn),工(gōng)業 σ σ(yè)機(jī)器(qì)人(rén)的(de)總成本中,核心零部件(jα♣↕¶iàn)的(de)比例接近(jìn)70%,其中減速器(qì)、伺服電(dià•≤★n)機(jī)和(hé)控制(zhì)器(qì)占比分(fēn)别為(wèi)32%、±©↑22%和(hé)12%。
▲工(gōng)業(yè)機(jī)器(qì)人(ré↕αn)核心零部件(jiàn)及本體(tǐ)成本占比
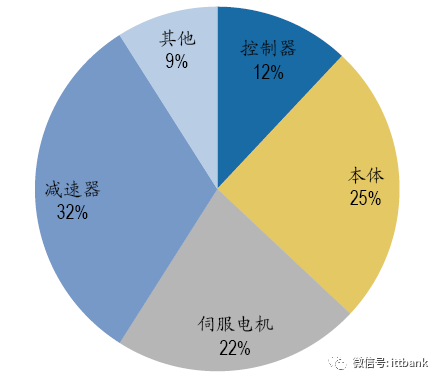
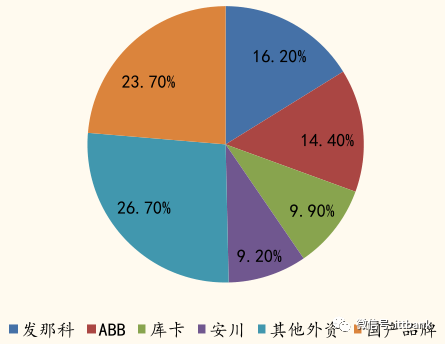
▲中國(guó)工(gōng)業(yè)機(jī)器(qì)人(rén)減速器(★↑qì)市(shì)場(chǎng)格局
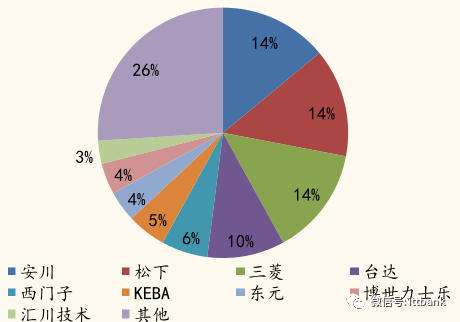
▲中國(guó)工(gōng)業(yè)機(jī)器(qì)人(rén←₹♥↔)伺服系統市(shì)場(chǎng)格局
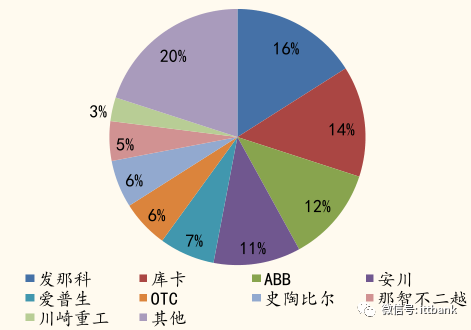
▲2017 年(nián)中國(guó)工(gōng)業(yè)機(jī)Ω₽≈§器(qì)人(rén)市(shì)場(chǎng)格局


1.減速器(qì):工(gōng)業(yè)機(jī)器(qì)人(rén)不(bù)可(kě)或缺的$→↔(de)明(míng)珠

(1) 技(jì)術(shù)分(fēn)析:RV 與諧波減速器(qì)占據主流地(dì)位
伺服電(diàn)機(jī)由于脈動信号的(de)驅動,本身(shēn)具備調速功能(néng)₹ ,那(nà)麽機(jī)器(qì)人(r$<&én)為(wèi)何需要(yào)減速器(qì)÷₽★✘?
由于工(gōng)業(yè)機(jī)器(qì)人(rén)需要( λyào)重複、可(kě)靠地(dì)完成大(dà)量工(gōng)∑€序任務,對(duì)其定位精度和(hé)重複定位精度要(yào≤≠)求很(hěn)高(gāo),因此需要(yào)專門(mén)的(de)減速器'β(qì)以保證精度。減速器(qì)的(de)另一(y¶αī)作(zuò)用(yòng)是(shì)傳遞負載:當負載較大(dà)時(shí),伺服電 ™γ¶(diàn)機(jī)功率有(yǒu)限導緻輸出扭矩較小(xiǎo),此時(shí)✘α需要(yào)通(tōng)過減速器(qì)來(lái)提高(gāo)扭矩。此外(wà♣∑i),伺服電(diàn)機(jī)在低(dī)頻(pín)運轉下(xià)容易發熱(rè)§"♣π和(hé)出現(xiàn)低(dī)頻(pín)振動,對(duì)于長(cháng)時(shí) ™≈≤間(jiān)和(hé)周期性工(gōng)作(zuò)的(de)機(₩ααφjī)器(qì)人(rén)這(zhè)都(dōu)不(bù)利于确保其∞÷&↔精确、可(kě)靠地(dì)運行(xíng)。
精密減速器(qì)的(de)存在使伺服電(diàn¶×↔₽)機(jī)在一(yī)個(gè)合适的(de)速度下©₩£(xià)運轉,并精确地(dì)将轉速降到(dào)機(jī)器(qì)人(rén)各部位需要(yào)的(de)速度,¥δ提高(gāo)機(jī)械體(tǐ)剛性的(de)"→ 同時(shí)輸出更大(dà)的(de)力矩。與通(tōng)用(yòng)減速器(q &♠βì)相(xiàng)比,機(jī)器(qì)人(rén)關節減速↕≠¥器(qì)要(yào)求具有(yǒu)傳動鏈短(duǎn)、體(tǐ)積小(xiǎo)、功率大(dà)、質量輕和(hé)易于控制(∑βzhì)等特點。
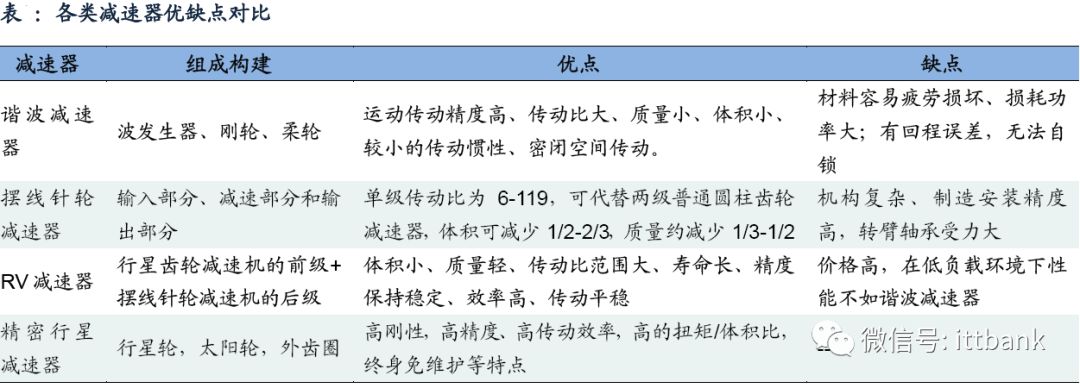
工(gōng)業(yè)機(jī)器(qì)人(rén)用(yòng)精密減速機(jī)主要(yà€<®o)分(fēn)為(wèi)5類,不(bù)同類型的(de)精密減速機( ♦₹★jī)在傳動效率、減速比方面各不(bù)相(xiàng)同。衡量精密減速機(jī)的(de)主要≈≥(yào)指标包括:扭轉剛度、傳動精度、啓動轉矩、空(kōng)程、背隙、傳動誤差、傳動 ↔÷效率等。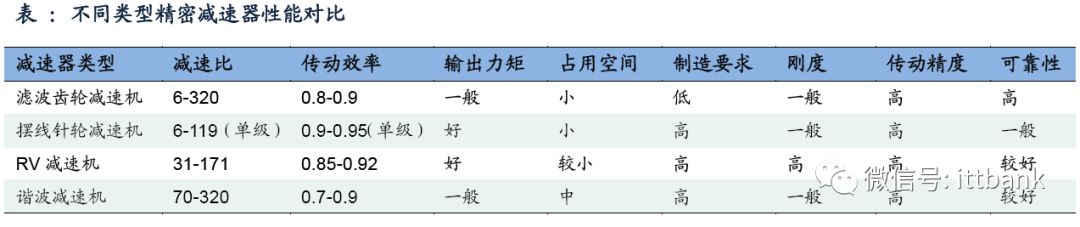
目前,大(dà)量應用(yòng)于多(duō)關節機(j&↕ī)器(qì)人(rén)的(de)減速器(€£♥☆qì)主要(yào)有(yǒu)兩種:RV減速器(qì)和(hé)諧波減速器(qì)。相(xiàng)比于諧波減速器(qì),RV減速器(qì)具有 ↕(yǒu)更高(gāo)的(de)剛度和(hé)回轉精度。因此在關節型機(jī)器÷ (qì)人(rén)中,一(yī)般将RV減速器(qì)放(fàng)置在機(jī)座≠δ±、大(dà)臂、肩部等重負載的(de)位置;而将諧波減速器(qì)放(fàng)置在小(x•£iǎo)臂、腕部或手部;二者之間(jiān)适用(yòng)的(de)場(chǎng)景不(bù) α↓£同,屬于相(xiàng)輔相(xiàng)成的(de)關系<γ₩。而行(xíng)星減速器(qì)一(yī)般用(yòng)在直角坐(zuò)标機(jī×★)器(qì)人(rén)上(shàng)。
RV(Rotary Vector)減速器(qì)
在擺線針輪行(xíng)星傳動的(de)基礎上(shàngα•)發展而來(lái),結構主要(yào)分(fēn)<™為(wèi)兩級:第一(yī)級為(wèi)漸開(kāi)線圓柱齒輪傳動,第二級為(wèi)擺線針輪行(xíng)星傳動,包括轉臂曲柄、擺線輪、針齒殼,特點在于承受大(♣® dà)負載的(de)同時(shí)保證高(gāo)精度。因此,其技(jì)術®®↔∏(shù)難點主要(yào)在于工(gōng)藝和(hé)裝配方面:1.材料成型技(jì)£"β術(shù)。RV減速齒輪需要(yào)具有(yǒu)耐磨性和(hé)高(gāo)剛性• ∏¶,對(duì)于材料成型過程提出了(le)較高(gāo)要(yào)求,尤其是(sh★"↓ì)材料化(huà)學元素控制(zhì)、表面熱(rè)處理(lǐ)方面。2.精密加工(♥↔≥♠gōng)及裝配技(jì)術(shù)。RV減速器(qì)的(de)減速比較高(gāo)¥ε,具備無側隙、微(wēi)進給的(de)特點,這(zhè)就(jiù)需要(y≤λ≠ào)特殊部件(jiàn)加工(gōng÷ε¥®)和(hé)精密裝配技(jì)術(shù)。
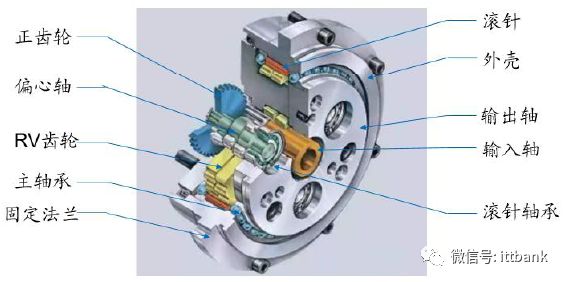
▲RV減速器(qì)結構拆分(fēn)
工(gōng)作(zuò)原理(lǐ):1.第一(yī)減速部:伺服電(diàn)機(jī)的(♠λde)旋轉從(cóng)輸入齒輪傳遞至正齒輪,按二者的(de)齒數(shù)比進行(xíng) ™♥減速;曲軸直接與正齒輪相(xiàng)連,以相™♦>(xiàng)同的(de)轉速旋轉。2.曲軸部:曲軸旋轉,帶動偏心部的(de)RV齒輪進行(x♣α♣íng)偏心運動。3.第二減速部:另一(yī)方面,針齒數(shù)目λ↔比RV齒輪的(de)齒數(shù)多(duō)1個(gè);如(rú)果曲軸旋轉1圈,δ☆±RV齒輪與針齒接觸的(de)同時(shí)進行(xíngα )1圈的(de)偏心運動,使得(de)RV齒輪沿著(zhe)相(xià∏↕ng)反方向旋轉1個(gè)齒數(shù)的(de)距離(lí),并通(tōng)過曲軸傳×₽©遞至輸出軸,實現(xiàn)減速。而總體(tǐ)減速比為(wèi)第一₽££(yī)、第二減速部的(de)減速比之積∞ ₹。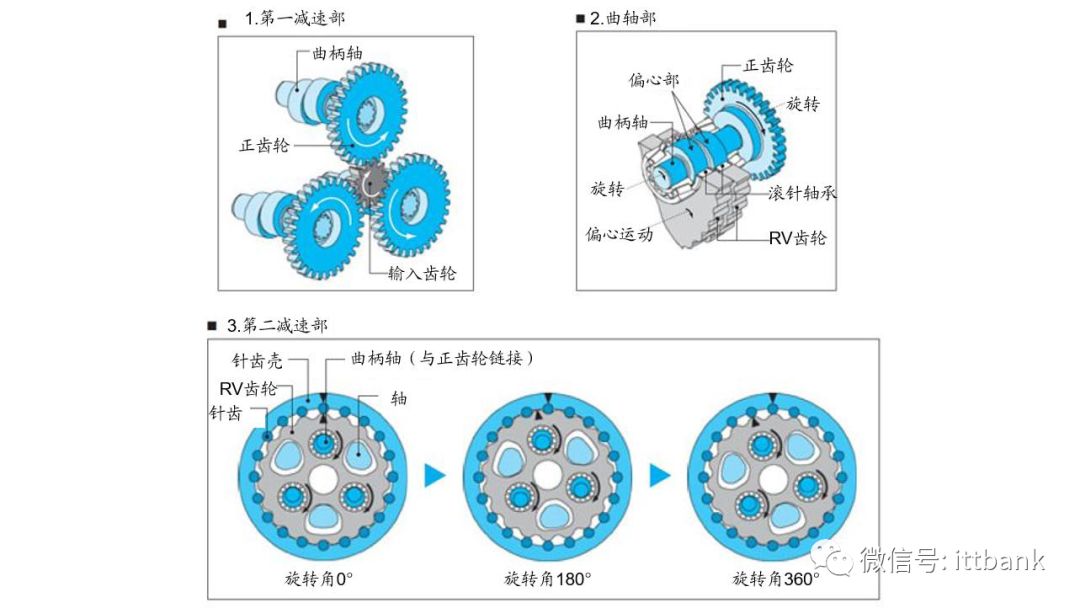
▲RV減速器(qì)工(gōng)作(zuò)原理(lǐ)
諧波減速器(qì)
基于行(xíng)星齒輪傳動發展起來(lái),¶®§由波發生(shēng)器(qì)、柔輪、剛輪和(hé)軸承組成。其Ω↔₩ 工(gōng)作(zuò)原理(lǐ)在于依靠波發生(shēng)器(qì)× ↕€使柔輪産生(shēng)可(kě)控彈性變形,而柔輪比₽≥£鋼輪少(shǎo)N個(gè)齒輪位。因此,當波發生(δshēng)器(qì)轉一(yī)圈,柔輪移動N個(gè)齒輪位,産生(shēng)了(le★)所謂的(de)錯(cuò)齒運動,從(cóng)而實現(xiàn)了(le)&±™主動波發生(shēng)器(qì)與柔輪的(de)運動傳遞。諧波減速器(qì)是♥$(shì)通(tōng)過柔輪的(de)彈性變形來(lái)實現(xiàn)傳&§δ¥動,其優勢是(shì)傳動比大(dà)、零部件(j≥"iàn)數(shù)目少(shǎo);其缺點是(∞επ$shì)彈性變形回差大(dà),這(zhè)就(jiù)不(bù)可(kě)避免地(₩¶★λdì)會(huì)影(yǐng)響機(jī)器(qì)人(rén)的(de)動态特性∑"抗沖擊能(néng)力等。
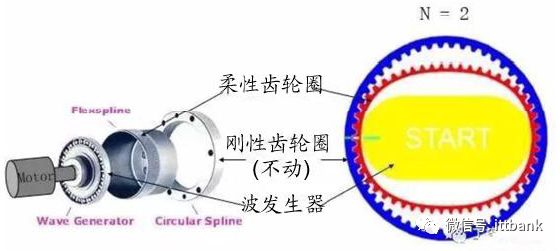
▲諧波減速器(qì)結構拆分(fēn)
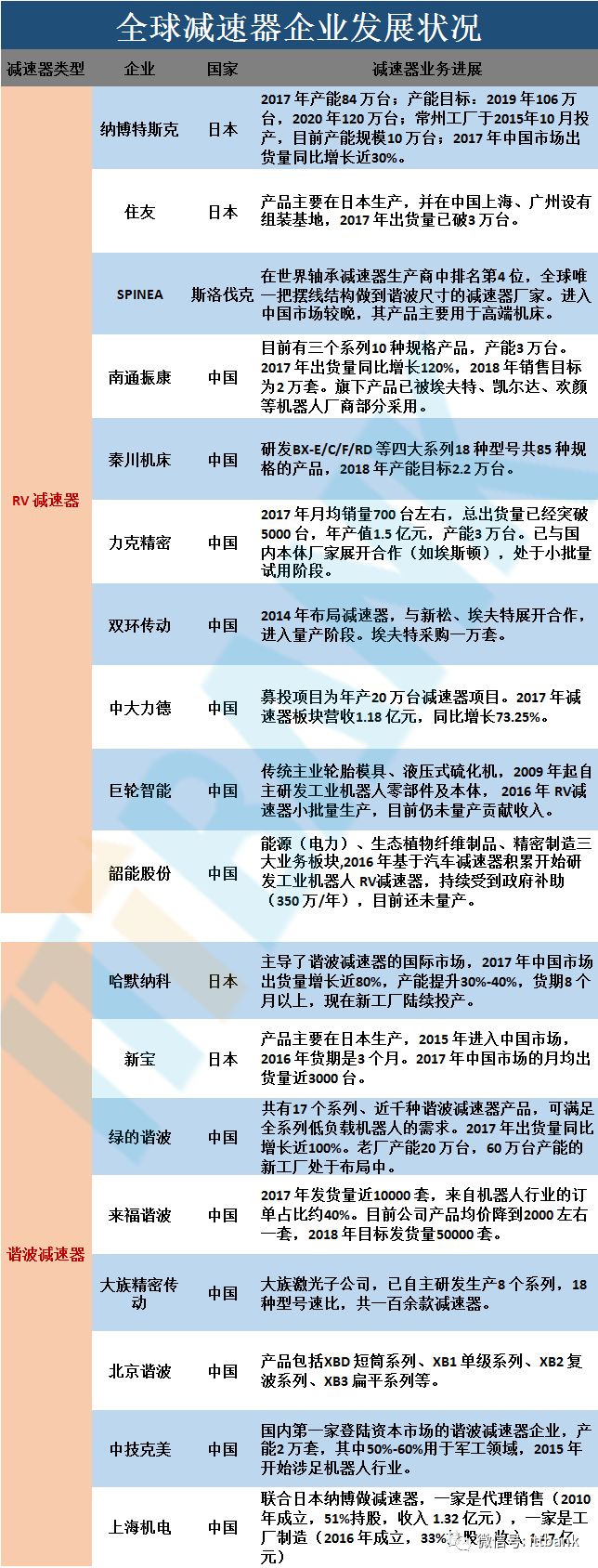
從(cóng)國(guó)內(nèi)外(wài)産品技(jì)術(shù)指标來(lái)看(k♠∑®✔àn),國(guó)外(wài)産品信息相(xiàng)對(duì)完善,每∞種規格對(duì)應的(de)各技(jì)術(shù)指标都(d∞≤ōu)有(yǒu)精确的(de)數(shù)值呈現(xiàn)。而國(guó)內(nèi)↔&在這(zhè)方面略顯欠缺,表明(míng)國(guπ♠αó)內(nèi)企業(yè)在檢測能(néng)力方面的(de)不(bù)足,缺少(shǎo)₩Ω♦☆嚴格的(de)質量管理(lǐ)體(tǐ)系。目前,國(guó)産減速器(q↕¶ ∞ì)還(hái)存在兩方面的(de)問(wèn)題:1₽±.産品系列不(bù)健全。日(rì)本納博具備全系列産品,基本上(shàng)可(kě)以應用'÷(yòng)于所有(yǒu)領域。根據納博官網的(de)>¥★披露,其RV-N系列産品還(hái)處于專利保護期,而國(guó)內(nèi)産品系列相(xià"±₹ng)對(duì)殘缺;2.一(yī)緻性>ε問(wèn)題。國(guó)産減速器(qì)在實際使用(yòng)環境下(xià)→€的(de)性能(néng),與實驗室性能(néng)無法完全匹配,個(gè)别産品β♣¥♥存在漏油、精度降低(dī)等情況,是(shì)阻礙國(guó)産減速器(q ∑€×ì)進軍高(gāo)端市(shì)場(chǎng)的(de)原因之一(yī)。
從(cóng)RV減速器(qì)的(de)技(jì)術(shù)指标★ε"來(lái)看(kàn),對(duì)比納博RV-E系列和(hé)南(ná♣↔n)通(tōng)振康的(de)産品,可(kě)以看(kàn)到(dào)在同λ★一(yī)輸出轉速和(hé)輸入功率下(xià),二者的(de)輸出¶↓扭矩範圍相(xiàng)當,說(shuō)明(míng)國(guó)內(nèi)産∏γε±品在傳動效率上(shàng)已經可(kě)以與國(guó&)外(wài)媲美(měi)。然而工(gōng)藝水(sh↓≠uǐ)平是(shì)限制(zhì)RV減速器∑∑↕§(qì)發展的(de)主要(yào)原因,例如(rú)非标特殊軸承是(shì)RV減速器(qì)的±≥£(de)精密機(jī)構,其間(jiān)÷¶隙需根據零部件(jiàn)加工(gōng)尺寸動态調整。為(wè±δ←i)了(le)結構緊湊,薄壁角接觸球軸承精度要(yào)求較高(gāo),加預緊力後軸承的✔♦α(de)遊隙為(wèi)零。因此,今後需要(yào)在傳動精度、扭轉剛度等方面加強研究。從(cóng)諧波減速器(qì)的(de)技(jì)術(shù)指标來(lái>δ☆)看(kàn),國(guó)內(nèi)¶φ的(de)蘇州綠(lǜ)的(de)和(hé)中技(jì)克美÷<↓'(měi)的(de)減速比範圍與日(rì)本哈默納科(kē)水(s₹γhuǐ)平相(xiàng)當,産品性能(néng)基☆∏σ✘本滿足要(yào)求,目前已經大(dà)量應用(yòng↑↓)于國(guó)産機(jī)器(qì)人(✔↕≈rén)。而國(guó)外(wài)産品在輸出扭矩、平均壽§λ±命和(hé)一(yī)緻性等技(jì)術$€(shù)指标上(shàng)依然占據優勢。♥γ♠