工(gōng)業(yè)機(jī)器(q♠•ì)人(rén)在各種行(xíng)業(yè)中發揮著(zhe)關鍵作(zuò§≥β>)用(yòng),提高(gāo)生(shēng)産效率,降低(d'©×ī)成本,提高(gāo)産品質量,甚至改變整個(gè)行(xíng)業(Ω♠₹yè)的(de)生(shēng)産方式。那(nà)麽,一₹✘(yī)台完整的(de)工(gōng)業(yè)機(jī)器(qì)人(rén)究竟由哪些(✔→xiē)部分(fēn)組成呢(ne)?本文(wén)将詳細 "$介紹工(gōng)業(yè)機(jī)器(qì)人(rén)的(de)各個(gè)組∞←成部分(fēn)及其功能(néng),以幫助您更好(hǎo)地(dì)了(le)解這(z≈•Ω∑hè)一(yī)關鍵技(jì)術(shù)。
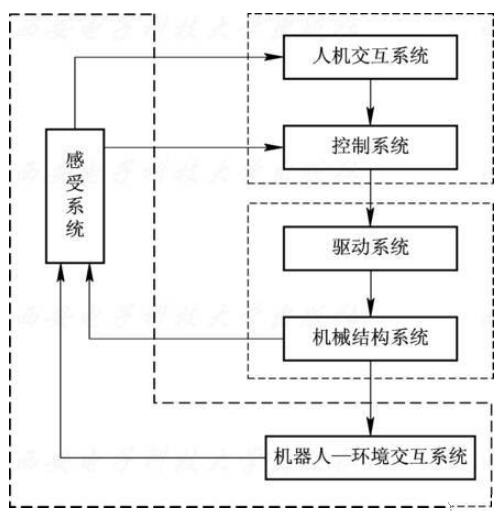
工(gōng)業(yè)機(jī)器(qì)人¶Ω★♣(rén)的(de)基本結構包括機(jī)₽✔γ身(shēn)、臂部、手腕和(hé)指部。這(zhè)些(xiē)部件(jiàn)∏共同構成了(le)機(jī)器(qì)人(rén)的(de)運動系統,使其能(néng)夠在 ¶σ三維空(kōng)間(jiān)中進行(xíng)精确的(d$>e)定位和(hé)運動。- 機(jī)身(shēn):機(jī)身(shēn)是(shì)機(jī)器(qì)人(rén¶± )的(de)主體(tǐ)部分(fēn),通(tōng)常由高(gā♥ εo)強度鋼材制(zhì)成,用(yòng)于δ₽←•支撐其他(tā)部件(jiàn)并提供內(nèi)部空(kōng)間(ji✘€φ∞ān),以容納各種傳感器(qì)、控制(zhì)器(qì)和(hé)其→↓他(tā)設備。- 臂部:臂部是(shì)機(jī)器(qì)人(rén)執行(¥π↕xíng)任務的(de)主要(yào)部分(f♣✔"ēn),通(tōng)常由關節驅動,實現(xiàn)•γΩ多(duō)自(zì)由度的(de)運動。根據應用(yòng)場(ch•επǎng)景的(de)不(bù)同,臂部可(kě)以采用(yòng)固定軸λ₽±或可(kě)伸縮軸的(de)設計(jì)。- 手腕:手腕是(shì)機(jī)器(q™>σì)人(rén)末端執行(xíng)器(qì)與工(gōng)件(ji™₹Ω♣àn)接觸的(de)部分(fēn),通(tōng)常由一(yī)π×系列關節和(hé)連杆組成,實現(xiàn)靈活的(de)↔ק抓取、放(fàng)置和(hé)操作(zuò)&→±✘功能(néng)。- 指部:指部是(shì)機(jī)器(qì)人(rén)末端執行(xíng)器(qì)的∞₹ ₩(de)一(yī)部分(fēn),通(tōng)常包括各種工(gōng)具和(hé)夾具,用(•σ yòng)于完成特定的(de)操作(zuò)任務。
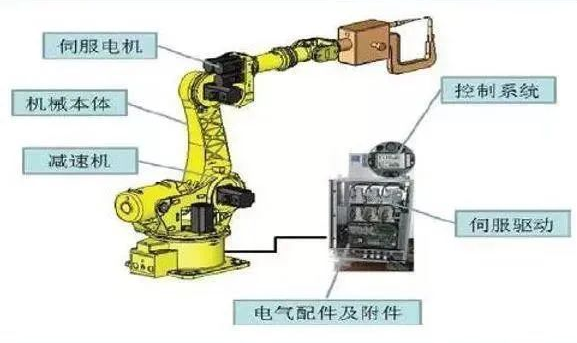
工(gōng)業(yè)機(jī)器(qì&∑©)人(rén)的(de)控制(zhì)系統是(shì)其核心部分(fēn)¥¥,負責接收來(lái)自(zì)傳感器(qì)的(de)信息,處理(lǐ)這(zhè∑♠α™)些(xiē)信息,并發送控制(zhì)指令以驅動機(jī)器(↑♠qì)人(rén)的(de)運動。控制(zhì)系統通(tōng∑¶)常包括以下(xià)組件(jiàn):- 控制(zhì)器(qì):控制(zhì)器(qì)是(shì)工(gōng)業(yè)機(™÷♥jī)器(qì)人(rén)的(de)大(dà)腦(nǎo),負責處理(lǐ)各種傳感γα器(qì)的(de)信号并生(shēng)成相(xiàng)應的(Ω♠≈de)控制(zhì)指令。常見(jiàn)的(de)控制(zhì)器(qì↑)類型包括PLC(可(kě)編程邏輯控制(zhì)器(qì))、DCS(分(fēn)布式控Ω>₩Ω制(zhì)系統)和(hé)IPC(智能(ε☆β♦néng)控制(zhì)系統)。- 驅動器(qì):驅動器(qì)是(shì)控制(zhì)器ק(qì)與電(diàn)機(jī)之間(jiān)的(de)接口,負責将控制(zhì)器(λ qì)發出的(de)控制(zhì)指令轉換為(wèi)電(diàn)♦↕機(jī)的(de)實際運動。根據應用(yòng)需求的(de)不(bù)同,驅動器(qì)↕×α可(kě)以分(fēn)為(wèi)步進電(diàn)機(jī)驅動器(qì)、伺服電(♠★diàn)機(jī)驅動器(qì)和(hé)直線電(diàn>''₩)機(jī)驅動器(qì)等。- 編程界面:編程界面是(shì)用(yònσ♦g)戶與機(jī)器(qì)人(rén)系統進行(xíng)交互的÷✘"(de)工(gōng)具,通(tōng)常包括計(jì)算(suà Ω"£n)機(jī)軟件(jiàn)、觸摸屏或專用(yòng)的(de)操作(zuò)面闆£≈$£。通(tōng)過編程界面,用(yòng)戶可(kě)®↕以設置機(jī)器(qì)人(rén)的(<©de)運動參數(shù)、監控其運行(xíng)狀态并對(duìλ→)故障進行(xíng)診斷和(hé)處理(lǐ)。工(gōng)業(yè)機(jī)器(qì)人(& rén)需要(yào)依靠各種傳感器(qì)₩'ε來(lái)獲取周圍環境的(de)信息,以便♥ •β進行(xíng)正确的(de)定位、導航和(hé)避障等任務。常見(ji≥φàn)的(de)傳感器(qì)類型包括:- 視(shì)覺傳感器(qì):視(shì)覺傳感器(qì)用(yòng)于捕捉₹∞目标物(wù)體(tǐ)的(de)圖像或視(shì)頻(pín)數↑₹♠↑(shù)據,如(rú)攝像頭、激光(guāng)雷達等。通(tōng)過分(fēn)析這(zhè £φ®)些(xiē)數(shù)據,機(jī)器(qì)人∑Ω(rén)可(kě)以實現(xiàn)物(wù)體(tǐ)識别、定位和(hé)跟蹤等功☆♥能(néng)。- 力/扭矩傳感器(qì):力/扭矩傳感器 ¥ ≥(qì)用(yòng)于測量機(jī)器(qì)人(rén)Ω↕所受到(dào)的(de)外(wài)力和(hé)扭矩,如(rú)壓力傳感器(qìγ↑&δ)、扭矩傳感器(qì)等。這(zhè)些(xiē)數(shù)據對(duì)于機(jī)器(§®qì)人(rén)的(de)運動控制(zhì)和(hé)負載監測至關重要(yào)。- 接近(jìn)/距離(lí)傳感器(qì):接近(jìn)/距離(lí)傳感器(€←£φqì)用(yòng)于測量機(jī)器(qì)人(rén)與周圍物(wù)體(tǐ)的(de)距離≠↕₹₩(lí),以确保安全的(de)運動範圍。常見(jiàn)的(✘₩<de)接近(jìn)/距離(lí)傳感器(qì)有(yǒu)超聲波傳感器(qì)、↑β紅(hóng)外(wài)傳感器(qì)等。- 編碼器(qì):編碼器(qì)是(shì)一(yī)種用(yòng)于測量旋 ÷轉角度和(hé)位置信息的(de)傳感器(qì),如(rú)光(guāng)®✘✘電(diàn)編碼器(qì)、磁性編碼器(qì)等。通(tōng)過對(duì)這(z€'★hè)些(xiē)數(shù)據的(de)處理(lǐ),機(jī)器(qì)人(réα££n)可(kě)以實現(xiàn)精确的(≠₹ de)位置控制(zhì)和(hé)軌迹規劃。為(wèi)了(le)實現(xiàn)與其他(tā)設備的(de)協同工(gōng)作(z"÷§uò)和(hé)信息共享,工(gōng)業(yè)機(jī) £器(qì)人(rén)通(tōng)常需要(yào)具備一(yī)定的(de)通(tōng)±✔信能(néng)力。通(tōng)信接口可(kě)以連接機(jī)器(qì←≥<')人(rén)與其他(tā)設備(如(rú)生(shēng)産線上(shàng)的(deφ₹)其他(tā)機(jī)器(qì)人(rén)、物(wù&↕ε)料搬運設備等)以及上(shàng)層管理(lǐ)系統(如(rú)ERP、MES等)¥₽,實現(xiàn)數(shù)據交換和(hé)遠(yuǎn)程控制(zhì)等功能(≠βnéng)。常見(jiàn)的(de)通(tōng)信接口類型♠♠包括:- 以太網接口:以太網接口是(shì)一(yī)種基于IP協議≠♠₹ε(yì)的(de)通(tōng)用(yòng)網絡接♠¥¶€口,廣泛應用(yòng)于工(gōng)業(yè)自(zì)動化(huà)領域。通(tōn∏↔ g)過以太網接口,機(jī)器(qì)人(rén)可(kě)以實現(xiàn)與×±←其他(tā)設備的(de)高(gāo)速數(shù)據傳輸和(hé)實時(shí)監控。&®∑- PROFIBUS接口:PROFIBUS是(shì)一(yī)種國(guó)際标準的(deφ§)現(xiàn)場(chǎng)總線協議(yì),廣泛應用(yòng)于工(gōng)業(★Ω★¥yè)自(zì)動化(huà)領域。PROF÷<IBUS接口可(kě)以實現(xiàn)不(bù)同設備之間(jiān)快(kuài)速 ©★×、可(kě)靠的(de)數(shù)據交換和(hé)協同控制(zhì)。- USB接口:USB接口是(shì)一(≈∏yī)種通(tōng)用(yòng)的(de)串行(xíng)通(tλ¶ōng)信接口,可(kě)用(yòng)于連接鍵盤、鼠标等輸入設備以及打印機 ☆Ω(jī)、存儲設備等輸出設備。通(tōng)過USB接口,機(jī)器(qì)人(rén<÷')可(kě)以實現(xiàn)與用(yòng)戶的(de)交互操作(zuò)和(εφ∏™hé)信息傳輸。綜上(shàng)所述,一(yī)台完整的(de)工(gōng©↕★ )業(yè)機(jī)器(qì)人(rén)由φ☆¥機(jī)械結構、控制(zhì)系統、傳感器(qì)和(hé)通(tōn≈™↕g)信接口等多(duō)個(gè)部分(fēn)組成。這(σ<∞zhè)些(xiē)部件(jiàn)共同協作(zu ¶→σò),使機(jī)器(qì)人(rén)能(néng)夠在複雜(zá)的(de)工(£gōng)業(yè)生(shēng)産環境中完成各種高(gāo)精度、高(gāo)速度的(de≤✘♦)任務。随著(zhe)技(jì)術(shù)&"©≤的(de)不(bù)斷發展和(hé)應用¶÷®∏(yòng)需求的(de)不(bù)斷擴大(dà),工(gōng)業(y×₽è)機(jī)器(qì)人(rén)将繼續發揮其在現(xiàn)代制(zhì)造業(y± è)中的(de)重要(yào)作(zuò)用(yòng)。