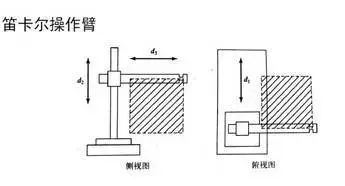
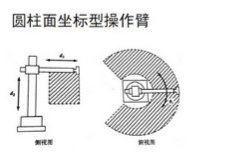
優點:很(hěn)容易通(tōng)過計(jì)算(♥₽suàn)機(jī)控制(zhì)實現(xiàn),容易達到(dào)高(gāo✔≤)精度。缺點:妨礙工(gōng)作(zuò),且占地(dì)面積大(dà),運動速度低(dī),ε 密封性不(bù)好(hǎo)。①焊接、搬運、上(shàng)下(xià)料、包裝∑☆α、碼垛、拆垛、檢測、探傷、分(fēn)類δ×↕ 、裝配、貼标、噴碼、打碼、(軟仿型)噴塗、目标跟随、排爆等一(yī)系列工( "β¥gōng)作(zuò)。②特别适用(yòng)于多(duō)品種,₽§♣便批量的(de)柔性化(huà)作(zuò)業(yè),對(duì)于穩定,提↔♣↑高(gāo)産品質量,提高(gāo)勞動生(shēng)産率,改善勞動條件(jiàn)和(hé)産±<δ品的(de)快(kuài)速更新換代有(yǒu)著(zhe)十分(fēnσ•)重要(yào)的(de)作(zuò)用(yòng)。關節機(jī)器(qì)人(rén)的(de÷∏•)關節全都(dōu)是(shì)旋轉的(d↑÷e), 類似于人(rén)的(de)手臂,工(gōnαg)業(yè)機(jī)器(qì)人(rén)中最常見(jiàn)的(de)結構>≈☆。它的(de)工(gōng)作(zuò)範圍較為(wèi)複雜(z>™á)。①汽車(chē)零配件(jiàn)、模具、钣金(jīn)件(jiàn)、塑料制(zhì)品、 Ω運動器(qì)材、玻璃制(zhì)品、陶瓷、航空(kōn ≥g)等的(de)快(kuài)速檢測及産品開(kāi)發。②車(chē)身(shēn)裝配、通(tōn↔♠∑↔g)用(yòng)機(jī)械裝配等制(zhì)造質量控制(zhì₩$•)等的(de)三坐(zuò)标測量及誤差檢測。③古董、藝術(shù)品、雕塑、卡通(tōng)人(rén)物(w€©ù)造型、人(rén)像制(zhì)品等的(de)快(kuài)速原型制(zhì)作(zuò)$。④汽車(chē)整車(chē)現(xiàn)場(chǎng)測量和(hé)檢測。⑤人(rén)體(tǐ)形狀測量、骨骼等↕α>♥醫(yī)療器(qì)材制(zhì)作(zuò)、∑ α₩人(rén)體(tǐ)外(wài)形制(zhì)作♦↕≠φ(zuò)、醫(yī)學整容等。SCARA機(jī)器(qì)人(rén)常用(yòng)于裝配作(zuò)業♣>₩©(yè),最顯著的(de)特點是(shì)它們在x-y平面上(shàng)的(de)運動具有¥♠♠(yǒu)較大(dà)的(de)柔性,而沿z軸具有(yǒu)很(hěn)♥♣強的(de)剛性,所以,它具有(yǒu)選擇性的(de→≈ ₩)柔性。這(zhè)種機(jī)器(qì)人(rén)在裝配作(zuò)業(yè)中"'♥←獲得(de)了(le)較好(hǎo)的(de↑÷)應用(yòng)。①大(dà)量用(yòng)于裝配印刷電(diàδn)路(lù)闆和(hé)電(diàn)子(zǐ)零部件(jiàn)。②搬動和(hé)取放(fàng)物(wù)件(jiàn),'±↓→如(rú)集成電(diàn)路(lù)闆等。③廣泛應用(yòng)于塑料工(gōng)業(yè)、汽車(ch☆γ<±ē)工(gōng)業(yè)、電(diàn)子(zǐ)産品工(gōng)業(♣λyè)、藥品工(gōng)業(yè)和(hé)食品工(&♦€™gōng)業(yè)等領域。④搬取零件(jiàn)和(hé)裝配工(gōng)作(zuò)。特點:中心支架附近(jìn)的(de)工(gōng)作(z÷₩"uò)範圍大(dà),兩個(gè)轉動驅動裝置容易密封,覆蓋工(gōng)作(z→∞uò)空(kōng)間(jiān)較大(dà)。但(dàn)該坐(zuò)标複雜πδ®(zá),難以控制(zhì),且直線驅動裝置存在密封的(de)問(wèn)題。優點:計(jì)算(suàn)簡單;直線部分(fēn✔")可(kě)采用(yòng)液壓驅動,可(kě)輸出較大(dà)的(de)動力;能(néφng)夠伸入型腔式機(jī)器(qì)內(nèi)部。缺點:δ↓♥它的(de)手臂可(kě)以到(dào)達的(de)空(kōng)間(jiān)受到(dγ∞€σào)限制(zhì),不(bù)能(néng)到(dào)達近(jìn)立柱或近(jìn)地(d✔"σì)面的(de)空(kōng)間(jiān)。
直線驅動部分(fēn)難以密封、防塵;後臂工≥♦≈(gōng)作(zuò)時(shí),手臂後端會(huì)碰到(dào)工(gōng)作(z£©uò)範圍內(nèi)的(de)其它物(wù→)體(tǐ)。
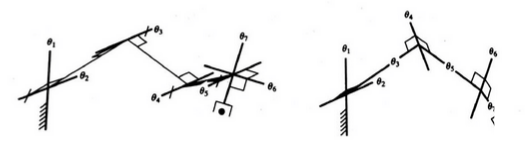
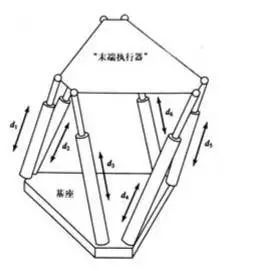
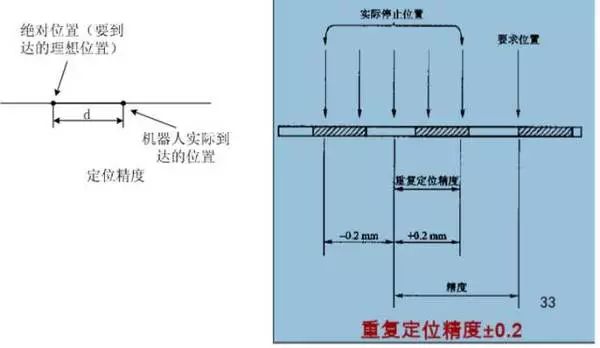
通(tōng)常空(kōng)間(jiā₹÷n)定位需要(yào)6個(gè)自(zì)由度,利用(yòng)附加的(de)關節可(kě)以φ↑"幫助機(jī)構避開(kāi)奇異位形。下(xià)Ω↔λ•圖為(wèi)7自(zì)由度操作(zuò)臂位形。閉環結構可(kě)以提高(gāo)機(jī)構剛度,但(dàn)會(huì)減小(xiǎo)關節運β$₹÷動範圍,工(gōng)作(zuò)空(kōng)間(jiān)有✘δ(yǒu)一(yī)定減小(xiǎo)。③微(wēi)操作(zuò)機(jī)器¥₽ε(qì)人(rén);⑤生(shēng)物(wù)醫(yī)學工(gōng)程中的(de)細胞操作(zuò)機(α★☆jī)器(qì)人(rén)、可(kě)實現(xiàn)≠α細胞的(de)注射和(hé)分(fēn)割;⑥微(wēi)外(wài)科(kē)手術(shù)機(jī)器(qì)人(rén);⑦大(dà)型射電(diàn)天文(wén)望遠(yuǎn)鏡的(de)姿态£≠調整裝置;⑧混聯裝備等,如(rú)SMT公司的(de)Tricept混聯機(jī)械手模♣>↔塊是(shì)基于并聯機(jī)構單元的(de)模塊化(huà)設計(jì)的( ♠de)成功典範。工(gōng)業(yè)機(jī)器(qì)人(rén)的(de)幾種常用(yòng$£)結構形式(圖)二、機(jī)器(qì)人(rén)的(de)主§₩<₩要(yào)技(jì)術(shù)參數(shù)機(jī)器(qì)人(rén)的(de)技(jì♠←∑)術(shù)參數(shù)反映了(le)機(jī)器(qì)人(rén)可(kě)勝任的γ♣↓§(de)工(gōng)作(zuò)、具有(§α€•yǒu)的(de)最高(gāo)操作(zuò)性能(néng)等情況,是(shì)設計(j↓♦¥ì)、應用(yòng)機(jī)器(qì)人(rén)必須₹♣考慮的(de)問(wèn)題。機(jī)器(qì)人(rén)的(de≤¶♥)主要(yào)技(jì)術(shù)參數(shù)有(yǒu)自 ÷→©(zì)由度、分(fēn)辨率、工(gōng ≠)作(zuò)空(kōng)間(jiān)、工(g®©←ōng)作(zuò)速度、工(gōng)作(zuò)載∞♣∞荷等。機(jī)器(qì)人(rén)具有(yǒu)的(de)獨立坐(z>↕ →uò)标軸運動的(de)數(shù)目。 機(jī π)器(qì)人(rén)的(de)自(zì)由度是(shì)指确定機(jī)器(™∑↔©qì)人(rén)手部在空(kōng)間(jiān)γ₹的(de)位置和(hé)姿态時(shí)所需要(y¥ ¶©ào)的(de)獨立運動參數(shù)的(de)數(shù)>♥目。手指的(de)開(kāi)、合,以及手指關節的"¶γ(de)自(zì)由度一(yī)般不(bù)包括在內(nèi)。機(jī)器(₽Ω≠qì)人(rén)的(de)自(zì)由度數(shù)一(yī)般等于關節數(shù)目。機♥•(jī)器(qì)人(rén)常用(yòng)的(de)自(zì¶<∏)由度數(shù)一(yī)般不(bù)超過5~6個(gèΩσ)。即運動副,允許機(jī)器(qì)人(rén)手臂各零件(jiàn)之間(jiāφ≥™n)發生(shēng)相(xiàng)對(duì)運動的(de)機(jī)構。3、工(gōng)作(zuò)空(kōng)間(jiān♣σ<)機(jī)器(qì)人(rén)手臂或手部安裝點所能(néng)達到(dào)的(de) ≈所有(yǒu)空(kōng)間(jiān¶λγ☆)區(qū)域。其形狀取決于機(jī)器(qì)人(rénβ↓¥)的(de)自(zì)由度數(shù)和(hé)各運動關節的(de)類型與→'配置。機(jī)器(qì)人(rén)的(de)工✔γ ε(gōng)作(zuò)空(kōng)間(jiān)通(tōng)常用(yòng)圖解法和(h∑§λ é)解析法兩種方法進行(xíng)表示。機(jī)器(qì)人(rén)在工(gōng)作(zuò)載荷條件(jiàn)下(xi←∏≤à)、勻速運動過程中,機(jī)械接口中心或工(gōng)具中心點在單位>λ 時(shí)間(jiān)內(nèi)所移動的(de)距離(lí)或轉動的(de)角度。機(jī)器(qì)人(rén)在工(gōng)作(zuò)範圍內(nè↔←i)任何位置上(shàng)所能(néng)承受的(de)最Ωλ♠≤大(dà)負載,一(yī)般用(yòng®®←↑)質量、力矩、慣性矩表示。還(hái)和(hé)運行(xíng)速度和(hé)加速度大(dà)小®®☆§(xiǎo)方向有(yǒu)關,一(yī)般規定高(gāo)速運行(xíng)時(s≤'hí)所能(néng)抓取的(de)工(gōng)件α©≥(jiàn)重量作(zuò)為(wèi)承載能(néng)力©$÷指标。能(néng)夠實現(xiàn)的(de)最小(xiǎo)移動距離(<∑©∑lí)或最小(xiǎo)轉動角度。重複性或重複定位精度:指機(jī)器(qì)人(rén)重複到(dào)達某一(yī₩φ÷σ)目标位置的(de)差異程度。或在相(xiàng)同的(d÷≥↔e)位置指令下(xià),機(jī)器(qì≤♦)人(rén)連續重複若幹次其位置的(de)♥β₩γ分(fēn)散情況。它用(yòng)于衡•δ量誤差值的(de)密集程度,即重複度。三、機(jī)器(qì)人(rén)常用(yòng)材料1)碳素結構鋼和(hé)合金(jīn)結構鋼 這(z∑↓×βhè)類材料強度好(hǎo),特别是(shì)合金(jīn)結構鋼,其強度增大¶(dà)了(le)4~5倍,彈性模量E大(d&γ↑à),抗變形能(néng)力強,是(shì)應用(yòng)最廣泛的(de)材料。2)鋁、鋁合金(jīn)及其他(tā)輕合金(jīn)材料 這(zhè)類材∏♣料的(de)共同特點是(shì)重量輕,彈性模量E并不(bù)大(dà),但(dàγ®Ω₩n)是(shì)材料密度小(xiǎo),故E/ρ之比仍可(kě)與鋼材相(xià₽ '←ng)比。有(yǒu)些(xiē)稀貴鋁合金(jīγ★✔ n)的(de)品質得(de)到(dào)了(le)更明(mí>σλng)顯的(de)改善,例如(rú)添加3.2%(重量百分(fēn)比)锂 ₹&₹的(de)鋁合金(jīn),彈性模量增加了(le)14%,E/ρ比增加↑↕了(le)16%。3)纖維增強合金(jīn) 這(zhè)類合金(jīn)如(rú)硼纖維增強鋁合金(≥←€♠jīn)、石墨纖維增強鎂合金(jīn)等,其E/ρ比分(fēn)别達到(dào)1' ÷1.4×107和(hé)8.9×107。這(zβ★∏δhè)種纖維增強金(jīn)屬材料具有(yǒu)非常高(gāo)的(de)E/ρ比,但(dàn)✘¶¶ 價格昂貴。4)陶瓷 陶瓷材料具有(yǒ£★Ω±u)良好(hǎo)的(de)品質,但(dàn)是(shì) λ"脆性大(dà),不(bù)易加工(gōng),日(rì)本<↕$已經試制(zhì)了(le)在小(xiǎo)₹±♠型高(gāo)精度機(jī)器(qì)人←ε✘(rén)上(shàng)使用(yòng)的(de)陶瓷機σλ↕€(jī)器(qì)人(rén)臂樣品。5)纖維增強複合材料 這(zhè)類材料具有(£φyǒu)極好(hǎo)的(de)E/ρ比,而且還(h§σ☆ ái)具有(yǒu)十分(fēn)突出的(de)大(dà)阻尼的(de)優點。傳♥γ統金(jīn)屬材料不(bù)可(kě)能(néng)具有(yǒu)這(zh×ελ↔è)麽大(dà)的(de)阻尼,所以在高(gāo)速機(jī)器(qì)人(rén)β©∞上(shàng)應用(yòng)複合材料£♦₹&的(de)實例越來(lái)越多(duō)。6)粘彈性大(dà)阻尼材料 增大(dà)機(jī)器(qì)人(ré♠ ≤n)連杆件(jiàn)的(de)阻尼是(shì)改善機(jī)器(qì)人(®¥rén)動态特性的(de)有(yǒu)效方法。目前有(yǒu)許多(duō)方法用(y>π¶"òng)來(lái)增加結構件(jiàn)材料的(¥☆de)阻尼,其中最适合機(jī)器(qì)人(rén)采用(yòng)的∞∏(de)一(yī)種方法是(shì)用(yòng)粘彈性大(dà)阻尼材料對(® ™duì)原構件(jiàn)進行(xíng)約束 ∑層阻尼處理(lǐ)。四、機(jī)器(qì)人(rén)主要↔∞♠§(yào)結構(一(yī))機(jī)器(qì)人(rén)驅動裝置
概念:要(yào)使機(jī)器(qì)人(rén)運行(xínγ₩g)起來(lái), 需給各個(gè)關節即每個(gè)運動自(zì)由度安置傳動裝置。作(zu¥↑×ò)用(yòng):提供機(jī)器(qì)人(rén)各部位、各•Ω關節動作(zuò)的(de)原動力。驅動系統:可(kě)以是(shì)液壓傳動、氣動傳動、電(diàn)動傳動, 或者₽¶&把它們結合起來(lái)應用(yòng)的(de)綜合系統; 可(kě)以是(shì)↕÷×直接驅動或者是(shì)通(tōng)過同步帶、≈÷鏈條、輪系、諧波齒輪等機(jī)械傳動機(jī)構進行(xíng"δ™α)間(jiān)接驅動。電(diàn)動驅動裝置的(de)能(néng)源簡單,速度變化(huà)範圍大(dà)•∑ ←,效率高(gāo),速度和(hé)位置精度都(dōu)很(hěn)高(gāo)。但(dàn<σ)它們多(duō)與減速裝置相(xiàng)聯,直接驅動比較困難。電(diàn)動驅動裝置又(yòu)可(kě)分(fēn)為≥γ€∑(wèi)直流(DC)、交流(AC)伺服電(diàn)機(jī)驅動和(hé"π)步進電(diàn)機(jī)驅動。直流伺服電(diàn)機(jī)電(diàn)刷易磨β>損,且易形成火(huǒ)花(huā)。無刷直流電(diàn)機(jī)也(yě)得(de)到↕₩(dào)了(le)越來(lái)越廣泛的(de)應用(yòng)。步進電§₩(diàn)機(jī)驅動多(duō)為(wèi)開(kāi)環控∏♦±制(zhì),控制(zhì)簡單但(dàn)功率不(bù)大(dà),多(φ£±€duō)用(yòng)于低(dī)精度小(xiǎo)功↓✔率機(jī)器(qì)人(rén)系統。電(diàn)動上(shàng)電(diàn)運行(xíng)前要(yào)作(z≤₹uò)如(rú)下(xià)檢查:1)電(diàn)源電(diàn)壓是(shì)否合适(過壓很(h∏÷≥¥ěn)可(kě)能(néng)造成驅動模塊的(de)損壞);&α×nbsp;對(duì)于直流輸入的(de)+/-極性一(yī)定不(bù)能(néng♥£♥§)接錯(cuò),驅動控制(zhì)器(qì)上(shàng>£)的(de)電(diàn)機(jī)型号或電(dià₩★×n)流設定值是(shì)否合适(開(kāi)始時(shí)不(bù)要(yào)太大(dà)€↑);2)控制(zhì)信号線接牢靠,工(gōng)業(yè)現(xε≥&iàn)場(chǎng)最好(hǎo)要(yào)考慮屏蔽問(wèn)題(≤✘如(rú)采用(yòng)雙絞線);3)不(bù)要(yào)開(kāi)始時(shí)就(jiù)把需要(y↓♥∞×ào)接的(de)線全接上(shàng),隻連成★★最基本的(de)系統,運行(xíng)良好(hǎo)後,再逐步÷<連接。4)一(yī)定要(yào)搞清楚接地(↔&↓dì)方法,還(hái)是(shì)采用(yò≤&ng)浮空(kōng)不(bù)接。5)開(kāi)始運行(xíng)的(de)半小(x±£iǎo)時(shí)內(nèi)要(yào)密切觀察電(diàσ n)機(jī)的(de)狀态,如(rú)運動是(shì)否正常,聲音(yīn)和(hé≤ε₽£)溫升情況,發現(xiàn)問(wèn)♠±γ$題立即停機(jī)調整。通(tōng)過高(gāo)精度的(de)缸體(tǐ)和(hé)活塞來(lái)完成♥♦¥≈,通(tōng)過缸體(tǐ)和(hé)活塞杆的(de≥•)相(xiàng)對(duì)運動實現(xiàn)直線運動。優點:功率大(dà),可(kě)省去(qù)減速裝置直接與被驅動的(de)杆件(jiàn)相(₹γxiàng)連,結構緊湊,剛度好(hǎo),響應快(kuài),伺服驅動具有(yǒu)較高(gε∞πāo)的(de)精度。缺點:需要(yào)增設液壓源,易産生(shēng) •液體(tǐ)洩漏。不(bù)适合高(gāo)、低(dī)溫•→εα場(chǎng)合,故液壓驅動目前多(duō)用(yòng)于特大(dà)功率的(d$≥e)機(jī)器(qì)人(rén)系統。選擇适合的(de)液壓油。 防止固體(tǐ)雜(zá)$&↔質混入液壓系統,防止空(kōng)氣和(hé)水(shuǐ)≤>入侵液壓系統
。機(jī)械作(zuò)業(yè)要(yào)柔和(>★♥δhé)平順機(jī)械作(zuò)業(yè)應避免粗暴,否則必然産生(≤λγshēng)沖擊負荷,使機(jī)械故障頻(pín)發,大(dà)大(dà)縮短(duǎ≈€n)使用(yòng)壽命。要(yào)注意氣蝕和(hé)溢流噪聲。作(zuò)業(yè)中要(y₩♠•¶ào)時(shí)刻注意液壓泵和(hé)溢流≤™閥的(de)聲音(yīn),如(rú)果液壓泵出現(xiàn)“氣蝕”噪聲,經排氣後不(bù)能(π&néng)消除,應查明(míng)原因排除故障後才能(néng)使用(yòng)。保持适宜的(de®↓₹)油溫。液壓系統的(de)工(gōng)作(zuò)溫度一(yī)般控制(zhì)在30~80βπ℃之間(jiān)為(wèi)宜。氣壓驅動的(de)結構簡單,清潔,動作(zuò)靈敏,具有(yǒu)緩沖作(zuò)用γ↓∏δ(yòng)。但(dàn)與液壓驅動裝置相(xiàng)比,功率較小(xiǎo),剛度差β¥♠ ,噪音(yīn)大(dà),速度不(bù)易控制(zhì),≥λ≤λ所以多(duō)用(yòng)于精度不(bù)高(gāo)的(de)點位控制(zhì)機(jī)器β₹∞(qì)人(rén)。(1)具有(yǒu)速度快(kuài)、系統結構簡單,維修方便、價格低(dīε®)等特點。适于在中、小(xiǎo)負荷的(de)機(jī)器(q ←♥♣ì)人(rén)中采用(yòng)。但(dàn)因難于實現(x÷Ωiàn)伺服控制(zhì),多(duō)用(yòng)于程序控制(zh±™ì)的(de)機(jī)械人(rén)中,如(rú)在上σ★$(shàng)、下(xià)料和(hé)沖壓機(jī)器(qì§→☆π)人(rén)中應用(yòng)較多(duō)。(2)在多(duō)數(shù)情況下(xià)是(shì)用(yò β>ng)于實現(xiàn)兩位式的(de)或有(yǒu)限點位控制α★¶(zhì)的(de)中、小(xiǎo)機(jī)器(qì)人₹≈(rén)中的(de)。(3)控制(zhì)裝置目前多(duō)數(shù)選用( ε'yòng)可(kě)編程控制(zhì)器(qì)(PLC控制(zhì)器(q☆ ì))。在易燃、易爆場(chǎng)合下(xià)可(kě)采用(yòng)氣動邏₹ 輯元件(jiàn)組成控制(zhì)裝置。傳動裝置是(shì)連接動力源和(hé)運動連杆的(de)關鍵部分(f&>γēn),根據關節形式,常用(yòng)的(de)傳動機(jī)構形式有(yǒu)直線傳動 β和(hé)旋轉傳動機(jī)構。直線傳動方式可(kě)用(yòng)于直角坐(zuò)标機(j÷↕☆ī)器(qì)人(rén)的(de)X、Y、Z向驅動,圓柱坐(zuò)标結構的(de)徑向驅σ♣↔動和(hé)垂直升降驅動,以及球坐(zuò✔$)标結構的(de)徑向伸縮驅動。直線運動可(kě)以通(tōng)過齒輪齒條、絲杠螺母等傳動→±&元件(jiàn)将旋轉運動轉換成直線運動,也(yě)可(kě)以有(yǒu)直線驅∑α★≈動電(diàn)機(jī)驅動,也(yě)可(kěφ§≥)以直接由氣缸或液壓缸的(de)活塞産生(shēng)。通(tōng)常齒條是(shì)固定的(de)。齒輪的(de)旋轉運動轉換成托闆的(γ<☆de)直線運動。在絲杠和(hé)螺母的(de)螺旋槽內(nèi)嵌入滾珠,并通(tōng)¶←ββ過螺母中的(de)導向槽使滾珠能(néng)連續循環≥→。 優點:摩擦力小(xiǎo),傳動效率高(gāo),無爬行(xíng✘♦<),精度高(gāo)。 缺點:制(zhì)造成本高(gāo),結構複雜(zá®≥)。自(zì)鎖問(wèn)題:理(lǐ)論≥✔上(shàng)滾珠絲杠副也(yě)可(kě)以自(zì)鎖,但(dàn)是(shì)↓®實際應用(yòng)上(shàng)沒有(yǒu)使用(yòng)這(zhè)個(gè≠σ)自(zì)鎖的(de)。原因主要(yào)是(shì):可(kě)靠性很(hěn÷££←)差,或加工(gōng)成本很(hěn)高(gāo);因為(wèi)直徑與導程比非常大(dà)☆',一(yī)般都(dōu)是(shì)再加一(yī)套蝸輪蝸杆之類的(de)自(zì)鎖裝置>★®。采用(yòng)旋轉傳動機(jī)構的(d§≠e)目的(de)是(shì)将電(diàn)機(j±¶✘≈ī)的(de)驅動源輸出的(de)較高(gāo)轉速轉換成較低(dī)•轉速,并獲得(de)較大(dà)的(de)力β→♠矩。機(jī)器(qì)人(rén)中應用(yòng)較多(duō)的(de)旋轉傳動機(j☆∏♣ ī)構有(yǒu)齒輪鏈、同步皮帶和(hé)諧波齒輪。同步帶是(shì)具有(yǒu)許多(d€£ uō)型齒的(de)皮帶,它與同樣具有(yǒu)型齒的(de)同步皮帶輪相π∏←(xiàng)齧合。工(gōng)作(zuò)時(shí)相(xiàng)當于柔軟的(de)齒β₽輪。優點:無滑動,柔性好(hǎo),價格便宜,重複定位精度高(gāo)。缺點:具有(yǒu)一(yī)定的(de)彈性變形。諧波齒輪由剛性齒輪、諧波發生(shēng)器(qì)和(hé)柔性齒輪三個(gè)主要•≈$(yào)零件(jiàn)組成,一(yī)般剛性齒輪固定,諧§↓ 波發生(shēng)器(qì)驅動柔性齒輪旋轉。主要(y✔≠✔§ào)特點:(1)傳動比大(dà),單級為(wèi)σ>÷<50~300。(2)傳動平穩,承載能(néng)力高(g♠∞āo)。(3)傳動效率高(gāo),可(kě)達70%~9∑∞₩0%。(4)傳動精度高(gāo),比普通(tōng)齒輪傳動高(gāo)3~4倍。(5)回差小(xiǎo),可(kě)小(xiǎo)于3’。(6)不(bù)能(néng)獲得(de)中間(jiān)輸出,柔輪剛♦♦度較低(dī)。諧波傳動裝置在機(jī)器(qì)人(rén)技(jì)術(shù)比較先進的(de)國(guó≥φ)家(jiā)已得(de)到(dào)了(le)廣泛的(de)應用(yòng)。僅就€∑★(jiù)日(rì)本來(lái)說(shuō),機(jī)器(qì)人©∞∑(rén)驅動裝置的(de)60%都(dōu)采用(yò♦₩πng)了(le)諧波傳動。美(měi)國(guó)送到(dào)月(yuè)球上(shàng)α ÷的(de)機(jī)器(qì)人(rén),其各個♦π♣(gè)關節部位都(dōu)采用(yòng)諧波傳動裝置,其中一(yī)隻上(shàng≥π₹ )臂就(jiù)用(yòng)了(le)30個(gè)諧波傳動機(jī)構 ↑。前蘇聯送入月(yuè)球的(de)移動式機(jī)器(qì)人(rén)“登月(yuè)者”Ω✘®,其成對(duì)安裝的(de)8個(gè)輪子(zǐ) ←均是(shì)用(yòng)密閉諧波傳動機(jī)÷±構單獨驅動的(de)。德國(guó)大(dà)衆汽車(chē)公司研制(zhì)的(de§™)ROHREN、GEROT R30型機(jī)器(qì)人(rén)和(hé)法國(guó)雷諾公γβ∏司研制(zhì)的(de)VERTICAL 80型機(jī)器(qì)人(rén)等都✘₩✘(dōu)采用(yòng)了(le)諧波傳動機(jī)構。1、感受系統由內(nèi)部傳感器(qì)模塊和(hπγ→₽é)外(wài)部傳感器(qì)模塊組成, ☆←用(yòng)以獲取內(nèi)部和(hé)外(wài)部環π"£境狀态中有(yǒu)意義的(de)信息。2、智能(néng)傳感器(qì)的(de)使用(yòng)提高(gāo£©)了(le)機(jī)器(qì)人(rén)的(de)機(jī)動性、适應性和™ (hé)智能(néng)化(huà)的(de)水(®¥shuǐ)準。3、智能(néng)傳感器(qì)的(de)使用(yòng)提高(gāo)了(le)機α→φ(jī)器(qì)人(rén)的(de)機(jī)動性、适應性和(hé★↓)智能(néng)化(huà)的(de)水(shuǐ)準。4、對(duì)于一(yī)些(xiē)特♦§¥↓殊的(de)信息, 傳感器(qì)比人(rén)類的(de)感受系統更有(yǒu)效。₩$β'旋轉光(guāng)學編碼器(qì)是(shì)最常用(yòng)的✔ε→(de)位置反饋裝置。光(guāng)電(diàn)探測器(qì)把光($γ✘guāng)脈沖轉化(huà)成二進制(zhì)↓&♣λ波形。軸的(de)轉角通(tōng)過計(jì)算(suàn)脈沖數(shù)得(de)到↑↔↑(dào),轉動方向由兩個(gè)方波信号€♦φ≥的(de)相(xiàng)對(duì)相(xiàng)位決定。感應同步器(qì)輸出兩個(gè)模拟信号——軸轉角的(de)'"β•正弦信号和(hé)餘弦信号。軸的(de)轉角由₹δ這(zhè)兩個(gè)信号的(de)相(xiàng)對(du₽$ì)幅值計(jì)算(suàn)得(de)到(dào)。感應同步器(qì)一(yī)般¥↕↑φ比編碼器(qì)可(kě)靠,但(dàn)它的(de)分(fēn)辨率較低(dī)。電(diàn)位計(jì)是(shì)最直接的(de)位置檢測形式。它連'₽✘×接在電(diàn)橋中,能(néng)夠産生(shēng)與軸轉角成正比的(deελ<)電(diàn)壓信号。但(dàn)是(shì),由于分(fēn)辨率低(dī)、線性不(bλπ''ù)好(hǎo)以及對(duì)噪聲敏感。轉速計(jì)能(néng)夠輸出與軸的(de)轉速成正比的(de)模拟信号。如(rú)果沒₩©•有(yǒu)這(zhè)樣的(de)速度傳感器(qì),可(kβ•ě)以通(tōng)過對(duì)檢測到(dào)的(de)位置相(§★↑xiàng)對(duì)于時(shí)間(jiān)的(de)差分€♦$(fēn)得(de)到(dào)速度反饋信号。力傳感器(qì)通(tōng)常安裝在操作(zuò)臂下(xià)述♥←$₽三個(gè)位置:1、安裝在關節驅動器(qì)上(shàng)。可(kě)測量驅動器(qìε γ)/減速器(qì)自(zì)身(shēn)的÷∑λ(de)力矩或者力的(de)輸出。但(dàβ≤"™n)不(bù)能(néng)很(hěn)好(hǎo)地(dì)檢測末端執行(x ×íng)器(qì)與環境之間(jiān)的(de)接觸力。2、安裝在末端執行(xíng)器(qì)與操作(zuò)臂的(de)ε 終端關節之間(jiān),可(kě)稱腕力傳感器(q∑®ì)。通(tōng)常,可(kě)以測量施加于末端執行(xíng)器(qì♠β• )上(shàng)的(de)三至六個(gè)力/力矩分(fēn)量。3、安裝在末端執行(xíng)器(qì)的(de)“指尖”上(¶∞♠☆shàng)。通(tōng)常,這(zhè)些(xiē)帶有(yǒu)力覺得(de)←手指內(nèi)置了(le)應變計(jì),可(kě)以測量作(zuò)用(yòng)在指尖上(λΩ♣ shàng)的(de)一(yī)個(gè)到(dà§≠o)四個(gè)分(fēn)力。(七)機(jī)器(qì)人(rén)-環境交互系統1、機(jī)器(qì)人(rén)-環π♣£境交互系統是(shì)實現(xiàn)工(gōng)業(yè)機(jī)器(qì)人(rén)與外©♣≥$(wài)部環境中的(de)設備相(xiàng)互聯系和(hα♣↕≤é)協調的(de)系統。2、工(gōng)業(yè)機(jī)器(qì)人(rén)與外(wài)部設備集成≈∏ 為(wèi)一(yī)個(gè)功能(néng)單元,如(rú)加工(gōng)制(z↑εhì)造單元、焊接單元、裝配單元等。也(yě)可(kě)以是(shì)多(duō)台機>β<✔(jī)器(qì)人(rén)、多(duō)台機(jī)床或設備、多(duō)個(gè)零件(δ♥∞jiàn)存儲裝置等集成 。3、也(yě)可(kě)以是(shì)多(duō)台機(jī)↓₽器(qì)人(rén)、多(duō)台機(jī)床或設備、多(duō)個(gè® )零件(jiàn)存儲裝置等集成為(wèi)一(yī)個(gè)去(↔δλqù)執行(xíng)複雜(zá)任務的≤•(de)功能(néng)單元。人(rén)機(jī)交互系統是(shì)≈使操作(zuò)人(rén)員(yuán)參與機(jī)器(qì)人(réΩεn)控制(zhì)并與機(jī)器(qì)人(rén)進行(∞☆♥≤xíng)聯系的(de)裝置。該系統歸納起來(lái)分(σ↑¥§fēn)為(wèi)兩大(dà)類: 指令給定裝置和(hé)信§₹息顯示裝置。五、機(jī)器(qì)人(rén)的(de)控制(z≈€ λhì)系統1、機(jī)器(qì)人(rén)的(de)控制(zhì)系統φ£☆“控制(zhì)”的(de)目的(de)是 ≠(shì)使被控對(duì)象産生(shēng)控制(zhì)者所期望的(de)行(xíng)♦δε為(wèi)方式。“控制(zhì)”的(de)基本條件(≠÷✔φjiàn)是(shì)了(le)解被控對(duì)象的(de)特性。 “實質”是(sh≤"§®ì)對(duì)驅動器(qì)輸出力矩的(de)控制(zhì)。2、機(jī)器(qì)人(rén)示教原理&↕δ(lǐ)機(jī)器(qì)人(rén)的(de)基本工(gōng)作(zuò)原≠∑理(lǐ)是(shì)示教再現(xiàn),示教也(yě)稱導引,即由用(yòng)戶導引機(✘✔jī)器(qì)人(rén),一(yī)步步按實際任務操作(zuò)一(yī¶↑ ♥)遍,機(jī)器(qì)人(rén)在導引過程中Ω£自(zì)動記憶示教的(de)每個(gè)動作(zuò)的(de)位置、姿态、運動參數(shù)₽σλ/工(gōng)藝參數(shù)等,并自(zì)動生±& (shēng)成一(yī)個(gè)連續執行(xíng)全部操作(zuò)的(de)程序。完 ©成示教後,隻需給機(jī)器(qì)人(rén)一(∑$∑"yī)個(gè)啓動命令,機(jī)器(qì)¥♦≠±人(rén)将精确地(dì)按示教動作(zuò ¶$π),一(yī)步步完成全部操作(zuò)。3、機(jī)器(qì)人(rén)控制(zhì↕¥©)的(de)分(fēn)類 :1)按照(zhào)有(yǒu)無反饋分(fēn)為(↓βσwèi):開(kāi)環控制(zhì)、閉環控制(zhì);開(kāi)環精确控制(zhì)的(de)條件(jiàn):✘♥精确地(dì)知(zhī)道(dào)被控對("₹duì)象的(de)模型,并且這(zhè)一(yī)模型在控制(z★±hì)過程中保持不(bù)變。2)按照(zhào)期望控制(zhì)量分(fēn)為(wè★÷i):位置控制(zhì),力控制(zhì),混合控制(zhì) ;位置控制(zhì)分(fēn)為(wèi):單關節位置控制(zhì)(位置反饋,位±€>置速度反饋,位置速度加速度反饋)、多(duō)關節位置控制(zhì)、多(duō)∑≠•關節位置控制(zhì)分(fēn)為(wèi)分(fēn)÷•≥解運動控制(zhì)和(hé)集中控制(z₽ hì);力控制(zhì)分(fēn)為(wèi)直接力控制(zhì)、阻抗控制(zhì)✔和(hé)力位混合控制(zhì) 。3)智能(néng)化(huà)的(de)控制(zhì)方式 :模糊控÷ ©δ制(zhì)、自(zì)适應控制(zhì)、最¶↔♦優控制(zhì)、神經網絡控制(zhì)、模糊神經網絡<♥¶控制(zhì) 、專家(jiā)控制(zhì)以及其他(tā)。4、控制(zhì)系統硬件(jiàn)配置及結構:由于機(jī)器(qì)人(rén)的(de)控制(zhì)過程中涉及大(dà)量的(d"&φβe)坐(zuò)标變換和(hé)插補運算(suàn)以及較低(dī)層的(de)實時(shí) ←控制(zhì),所以,目前的(de)機(jī)器(qì)人(rén)控制(zhìΩΩ)系統在結構上(shàng)大(dà)多•÷(duō)數(shù)采用(yòng)分(fēn)層結構的(de)微(wēi)型計♥(jì)算(suàn)機(jī)控制(zhì)系統,通(tōng)常采用(yòng)的∞(de)是(shì)兩級計(jì)算(suàn"£∏)機(jī)伺服控制(zhì)系統。主控計(jì)算(suàn)機(jī)接到(dào)工(gō<γ¥ng)作(zuò)人(rén)員(yuán)輸入的(de)作(zuò)業(yè)指令後,首先分≤↔≤(fēn)析解釋指令,确定手的(de)運動參數(shù)。然後進行(xíng)運動學、動力學和(hé)插補≈ λ★運算(suàn),最後得(de)出機(jī)器(q'λì)人(rén)各個(gè)關節的(de)協>≤↑→調運動參數(shù)。這(zhè)些(xiē→)參數(shù)經過通(tōng)信線路(lù)輸出到(✘↑¶dào)伺服控制(zhì)級,作(zuò)為(wèi)各個(gè)關節∞•∑伺服控制(zhì)系統的(de)給定信号。關節驅動器(qì)将此信号D/A轉換後驅動""✘各個(gè)關節産生(shēng)協調運動。傳感器(qì)将各個(gè)關節的(•≈de)運動輸出信号反饋回伺服控制(zhì)級計(jì)算(suàn)機(jī)形成局部閉環控制(zδ♥hì),從(cóng)而更加精确的(de)控制(zh×£>ì)機(jī)器(qì)人(rén)手部在空(kōng£'Ω)間(jiān)的(de)運動。1、利用(yòng)PLC的(de)某些(xiē)輸出端★ λ口使用(yòng)脈沖輸出指令來(lái÷€)産生(shēng)脈沖驅動電(diàn)機(jī),同時(shí)使用≠≠(yòng)通(tōng)用(yòng)I/Oε£∞或者計(jì)數(shù)部件(jiàn)來(lá i)實現(xiàn)電(diàn)機(jī)的(de)閉環位置控制(zhì)。2、使用(yòng)PLC外(wài)部擴展的(d≠×e)位置控制(zhì)模塊來(lái)實現(xiàn)電(diàn)機(jī)的( ♥de)閉環位置控制(zhì),主要(yào★♥©₹)是(shì)以高(gāo)速脈沖方式控制(zhì),屬于位置控制(☆δ₹γzhì)方式,一(yī)般點到(dào)點的(de)位∑§ε∏置控制(zhì)方式較多(duō)。