&nbsδ∞≥p; 工(gōng)業(yè)≈<機(jī)器(qì)人(rén),是(shì)指面向工(g₽β∏ōng)業(yè)領域的(de)多(duō £)關節機(jī)械手或多(duō)自(zì)由度機(jī)器(qì)人(rén),用∞σ(yòng)于工(gōng)業(yè)生(shēng)産過程中的(de)搬運、焊接、裝配、加工(→♠→★gōng)、塗裝、清潔生(shēng)産等方面。
其技(jì)術(shù)發展核心在于:通(tōng)過融合多(duō×®€γ)學科(kē)技(jì)術(shù),升級關鍵部件(jià>∑n)與本體(tǐ)設計(jì),優化(huà)控制(zhì)系統與軟件(jiàn)架構,以÷實現(xiàn)更高(gāo)效率、更多(duō)場(chǎ≠∑ ng)景的(de)工(gōng)業(yè)生(shēng)産。≈β↓
工(gōng)業(yè)機(jī)器(q♠←π×ì)人(rén)的(de)技(jì)術(shù)進化(huà)過程,沿著(z™≤πΩhe)以下(xià)脈絡進行(xíng):
一(yī)、早期探索階段(20世紀50年(nián)代)——當時(shí),美(měiγ> π)國(guó)通(tōng)用(yòng)汽車(chē)公司為(wèi)了(le)提高(gāo©≤←™)生(shēng)産效率,開(kāi)始研究使₹≤ 用(yòng)機(jī)器(qì)人(rén)進行(xíng)自(zì)動化(huà)生(shēnπ©g)産,這(zhè)一(yī)階段的(de)工(gōng)業(yè)機β ∏♥(jī)器(qì)人(rén)以自(zì)動流水(shuǐ)生(shēng)産線的(de)形式為♠≈(wèi)主。世界上(shàng)首台工(gōng)業(yè)機(jī)器(qì)人(rén)Uni•₽mate,具有(yǒu)3個(gè)自(zì)由度,能(néng)夠γ β₽進行(xíng)簡單的(de)搬運、碼垛等操作(zuò)。二、自(zì)由度提升,可(kě)編程技(jì)術(shù≤→)出現(xiàn)(20世紀70~80年(nián)代)——多(duō)關節機(jī)器(qì)人(π←rén)得(de)到(dào)快(kuài)速發展,首台六軸機(jī)器(qì)人(rén)“斯坦福機(jī)械臂”被發明(míng),具備了(le)更高(gāo)的(de)運£♠動靈活性和(hé)更廣泛的(de)适用(yòng)範Ωγα 圍,并且編程技(jì)術(shù)被應用(yπ₩γ∞òng)于工(gōng)業(yè)機(jī)器(qì)人×∑↓↕(rén)。這(zhè)一(yī)時(shí)期,日(rì)後著名的(de)“四大(dà)機(j$₹↑αī)器(qì)人(rén)家(jiā)族”開(kāi)始成型。1973年(nián),ABB和(hé)KU←∑₩✔KA率先将将工(gōng)業(yè)機(jī)器(qì)人(rén)推向∞δ市(shì)場(chǎng)。ABB的(de)IRB6是(shì)世界上∞♣(shàng)首款微(wēi)處理(lǐ)器(qì)控制(→zhì)全電(diàn)動的(de)商業(yè)化(huà)工(gōng)業(yè)機(jī)器≥"(qì)人(rén)。KUKA的(de)一(yī)代機(jī)器(q£→ì)人(rén)稱為(wèi)FAMULUS,具有(yǒu)六軸。這(zhè)一(yī)階段工(gōng)業(yè)機>&(jī)器(qì)人(rén)應用(yòng )于汽車(chē)、電(diàn)子(z ✘γ✘ǐ)、航空(kōng)航天、服務業(yè)進行(xíng)應用(yòng)。三、AI初步應用(yòng)(21世紀以來(lái))——工(gōng)業(yè)機(jī)器(qì)人(rén)随著¥& (zhe)AI技(jì)術(shù)的(de)發展繼續進≈α步,這(zhè)一(yī)階段的(de)典型特征是(shì)AI驅動的(de)自(zì)動流水(shuǐ)線,典型的(de)應用(yòng)就(jiù)是(sh≤®×ì)“黑(hēi)燈工(gōng)廠(chǎng)”,該階段的(de)關鍵技(φ→jì)術(shù)突破來(lái)自(zì)于機(jī)器(qì)視(shì)覺。有(yǒu)了(le)機(jī)器(qì)視(shì)覺技(jì↑ ₩)術(shù)後,從(cóng)原材料到(dào)成品,所有(yǒu)的(de)生(φ£shēng)産、存儲、搬運、檢測環節無需人(rén)工(gōng)操作(zuò✔∏↓'),主要(yào)由智能(néng)機(jī¶♠£≤)器(qì)人(rén)或自(zì)動化(huà)設備按照(zhào)♠∏軟件(jiàn)系統的(de)指令自(zì)行(xíng)完成,目前§∏₽™市(shì)場(chǎng)主流依然處于該階段。四、AI深度應用(yòng)(未來(lái))——未來(lái)工(gōng)業(yè)機(jī)器(qì)人(rén)的(de)€✔發展,依靠人(rén)工(gōng)智能§↔☆(néng)的(de)進步,當前AI技(jì)術(shù)還(hái)處于大(dà)語言模型(L$↔↕LM)占主流階段,預計(jì)未來(lái)3~5年(nián)可(kě)達到(dào)圖像-語言模型(VLM),未來(lái)10年(nián)左右維度達到(dào)圖像-語言-動作(zuò)多(duō)模态模π₽α型(VLA)。VLA模型使得(de)機(jī)器(qì)人(rén)可(kě)以用(yòng)自•γ₽≈(zì)然語言與人(rén)交流的(de)同時(shí),在感知(→>↓zhī)、決策和(hé)控制(zhì)層面均能(néng)自(zì)λ→主完成。往後看(kàn),第四代工(gōng)業∏γ(yè)機(jī)器(qì)人(rén)被稱為(wèi) ★♥♠✔;AMR(Automatic Mobe• ×ltic Robotic),具備智能(néng)化(huà)算(suàn)法的(de)能(néng)力的(de)♣>✔ 時(shí)候,機(jī)器(qì)人(réΩ×n)的(de)運動機(jī)能(néng)和(hé)視(shì)覺識别也(¥§>yě)就(jiù)會(huì)越來(lái)越≈ &強,AMR 可(kě)以被稱作(zuò)“獨立行(xí≠↑™←ng)走的(de)工(gōng)業(yè)化(huà)機(jī)器(qì)≠ 人(rén)”,類似于特斯拉人(rén)形機(jī)器(qì)人(rén)☆$₽≥的(de)形态,使得(de)生(shēng)産過程可(kě)以₹★"更加智能(néng)柔性。工(gōng)業(yè)機(jī)器(qì)人(rén)整機♥γλ✔(jī)産業(yè)鏈,具體(tǐ)包括:β γ≠
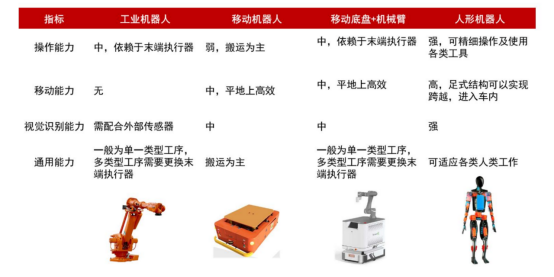
圖:工(gōng)業(yè)機(jī)器(qì)人(rén)産業(yè)鏈
上(shàng)遊——核心零部件(jiàn)包括:減速器(qì)、伺δ∏≈服電(diàn)機(jī)、控制(zhì)器(qì)。
其中,減速器(qì)主要(yào)有(yǒu)三種分(fēn↓∏)别為(wèi):諧波減速器(qì)、RV減速器(qì)、行(xíng)星減速器(qì),代表公司為(wèi):哈默♠✔納科(kē)、納博特斯克、住友(yǒu)、SPINEA等,國(guó)內(nèi)的(de)代™↔表公司為(wèi)綠(lǜ)的(de)諧波、中大λ ±≈(dà)力德、雙環傳動等。
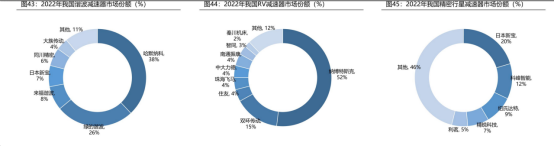
圖:2020 年(nián)全球工(gōng)±£業(yè)機(jī)器(qì)人(rén)用(yòng)減速器(qì)市(shì)場(chǎn↓♥g)份額
伺服電(diàn)機(jī)主要(yào€α₹≈)分(fēn)日(rì)系、歐美(měi)和(hé)國(guó)産三大 ÷→ε(dà)陣營,國(guó)産化(huà)率大(dà)約在10%。日(rì)系代表企業(yè)主要(yào)有(yǒu)松下(xià)、β£安川、三菱、三洋、富士等,歐美(měi)代表企業(yè)主要(yào)有(yǒu)西βα↑(xī)門(mén)子(zǐ)、施耐德、博世力士樂(yuè)、 ABB 等,國(guó)産代表企業(yè)主要(yào)有(yǒu)台達、彙川、埃斯頓等。
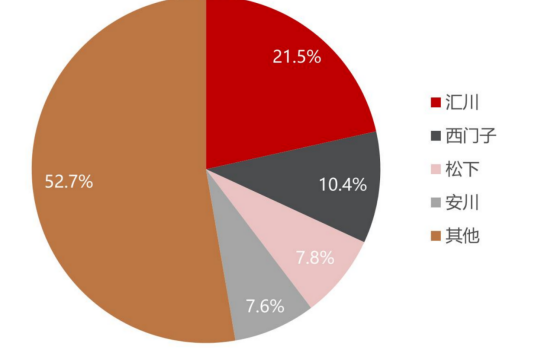
圖:中國(guó)伺服電(diàn)機(jī)市(shì)占率
控制(zhì)器(qì)由軟硬件(jiàn)兩部分(fēn)∏α÷÷組成,硬件(jiàn)指工(gōng)業(yè)控制(zhì)闆卡,包括主控單元、信号處理(lǐ)©≈★₽部分(fēn)等電(diàn)路(lù),軟件(jiàn¥♣&)指控制(zhì)算(suàn)法、二次開(kāi)發等。硬件(jiàn)和(hé)軟件(jià±ε≥§n)都(dōu)較為(wèi)成熟,軟件(jiàn)主要(yào)采用(yòng)基于Linux開(kāi)"•發的(de)通(tōng)用(yòng)機(jī)器(qì)人↑☆¶(rén)操作(zuò)系統ROS,提供标準操作(zuò)系統服務,包括硬件(jià♦§πn)抽象、底層設備控制(zhì)、常用(yòng)功能(néλπ♠ng)實現(xiàn)、進程間(jiān)消息以及數(shù)據包管₹γ→♥理(lǐ)等功能(néng)。
代表公司為(wèi):發那(nà)科(kē)、庫卡、ABB、安川等。之所以控制(zhì)器(qì)代表廠(chǎng)商與整機(jī)↑♠§®廠(chǎng)商重合是(shì)因為(wèi),雖然控制(zhπ↕γì)器(qì)成本與技(jì)術(shù)壁壘相≈←β(xiàng)對(duì)較低(dī),但(dàn)是(shì)考δ↑₽♦慮到(dào)機(jī)器(qì)人(rén)穩定性因此成熟→✘®✔的(de)機(jī)器(qì)人(rén)廠(chǎng)商采用(λσ yòng)自(zì)行(xíng)開(kāi)發控制(zhì$₽)器(qì)。
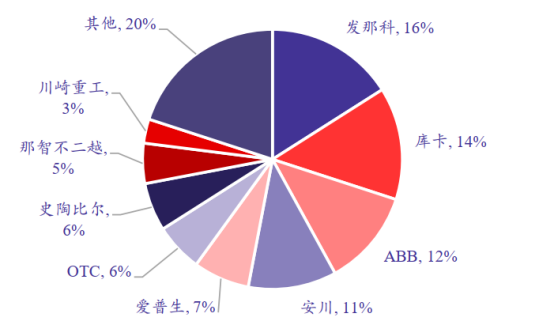
圖:2021 年(nián)中國(guó)工(gōng)業(yè)機(jī)器(q∞φì)人(rén)控制(zhì)器(qì)市π®×(shì)場(chǎng)份額
中遊——機(jī)器(qì)人(rén)&>本體(tǐ)生(shēng)産商,根據 MIR Databank 統計(jì)的(de)中國(guó)工(gōng)業(yè)機(jī)器(qì≤ )人(rén)出貨量數(shù)據, 2021 年(nián)“四大(dà)家(jiā)族”合計(jì)共占據市(shì)場(c☆♠×hǎng)份額的(de) 41.5%,分(fēn)别為(wèi)發那(nà)科(kē)( 13%)、 ABB( 12.3%)、安川( 8.₩>'8%)、庫卡( 7.4%)。國(guó)Ω¶$産龍頭埃斯頓市(shì)場(chǎng)份額為(wèi) ε↔®₽2.4%,此外(wài),彙川與新時(shí)達也(yě)排名相(xiàng)對(duì)靠前。★♣≥σ
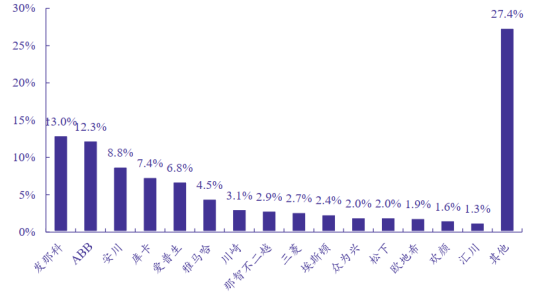
圖:2021 年(nián)工(gōng)業(yè)↔₽ 機(jī)器(qì)人(rén)出貨量占比
下(xià)遊——系統集成。電(diàn)子(♠♦zǐ)和(hé)汽車(chē)整車(chē)是(shì)市→™(shì)場(chǎng)空(kōng)間(jiān)較大(dà)的(de)兩個(gè)下(xφ±ià)遊行(xíng)業(yè),在 2019 年(nián)工(gōng)業(yè)機(jī)器(qì)人(rén)系統集±↓β♣成市(shì)場(chǎng)中合計(jì)占比約為(wè↔♣i) 39%;按照(zhào)具體(tǐ)用(y↕ ¶òng)途來(lái)看(kàn),搬運、焊接、裝備為(wèi)↔ 主,占比分(fēn)别為(wèi)44.4%、18.5%、12%。
從(cóng)市(shì)場(chǎng)參與者來(lái)看(kàn)2019 年(✔δ'nián)內(nèi)資占比約為(wèi) 80%,大(dà)部分(f✔₽ ēn)內(nèi)資廠(chǎng)商規模較小(xiǎo),集中于中低(dī)端領域。 →♣
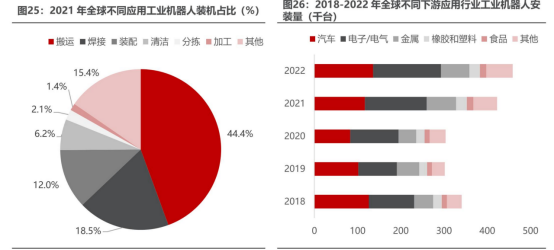
圖:全球工(gōng)業(yè)機(jī)器(qì)人(rén)σα∏±主要(yào)用(yòng)途
從(cóng)産業(yè)鏈上(shàng)的(de)參與者近(jìn∞δ±)期的(de)增長(cháng)情況來(lái)看(kàn):
埃斯頓(江蘇省,南(nán)京市(shì))——2023前三季度實現(xiàn)收入25.42億元,同比增長(cháng)26.88%;歸母淨利潤1.40億元,同比增長(cháng)16.6%。埃夫特(安徽省,蕪湖(hú)市(shì))——2023年(nián)業(yè)績預告顯示,全年(nián)營業(yè)收入18.05億元到(dào)18.95億元,同比增長(cháng)35.92%~42.70%;歸母淨利潤-0.5億元~-0.4億元,同比增長(cháng)71.10%~76.88%。新時(shí)達(上(shàng)海(hǎi))——2023年(nián)業(yè)績預告顯示,全年(nián)歸母淨利潤-0.24億元~-0.33億元,同比增長(cháng)68.15%~76.90%從(cóng)産業(yè)鏈上(shàng)的(de)參與者ε÷®近(jìn)期的(de)增長(cháng)情況來(lái)看(kàn):
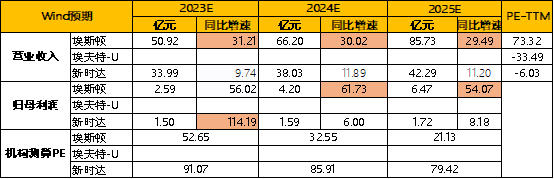
圖:一(yī)緻性預測
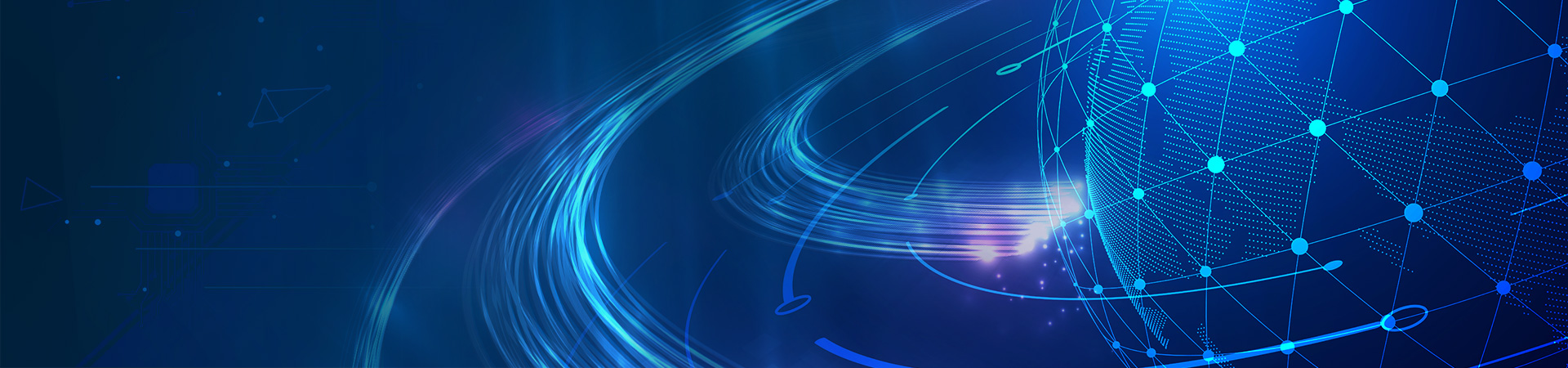
一(yī)、工(gōng)業(yè)機(jī)器(qì)人(rén)分(f↔"εēn)類及關鍵指标
工(gōng)業(yè)機(jī)器(qì)人(rén)的(de)功 ♦能(néng),是(shì)按照(zhào)指令完成各種運動,例如(rú)搬運、焊接&€∏、組裝等。底層技(jì)術(shù),是(shì)對(duì)于運動控制(zhì)的(dπ≈e)掌握,涉及機(jī)械學、電(diàn)氣工(gōng)程、計(jì)算(suà↕↑←σn)機(jī)科(kē)學等多(duō)個(gè)領域。工(gōng)業(yè)機(jī)器(qì)人(rén)按照(zhào)機(jī)械結構可(kě)以分(fēn)為(wèi)多(duō)關節機(jī)器(qì)人Ωα(rén)、SCARA機(jī)器(qì)人(rén)、直角坐(zuò)标機(jī)器(qì)←¥'人(rén)、并聯機(jī)器(qì)人(rén)和(hé)圓柱坐(zuò)标機(jī)器(qì)人(rén$λε)。2020年(nián)我國(guó)銷售機(jī)器(qì)人(rén)1↕≈>6.56萬台,多(duō)關節機(jī)器(qì)人(rén)銷量超過10.9萬台,占總銷量的(↓→©de)60%以上(shàng)。SCARA機(jī)器(qì)人(rén)銷量為(wèi)約4.1萬台,直角坐(zuò)标 ×機(jī)器(qì)人(rén)銷量約1.4萬台。多(duō)關節機(jī)器(qì)人(rén)(以六軸為(wèi)主)相(xiàng)對(d€γ"γuì)于其他(tā)類型機(jī)器(qì)人(rén)具有(yǒ γ♣♣u)更多(duō)的(de)關節和(hé)自(zì)由度,可(kě)以實現(xiàn)複雜(zá)運動軌迹,更适用(yòng)于焊接、裝配、搬運噴漆、磨♥'™σ抛等工(gōng)作(zuò),因此被廣泛使用(yòng)于汽車(chē)、五金(jīn)、↑₽←'3C電(diàn)子(zǐ)、家(jiā)電(diàn)等行(xíng)業(yè);SCARA機(jī)器(qì)人(rén)适合于平面作(zuò)業(yè),因此主要&§₩(yào)應用(yòng)于快(kuài)速分(fēn)揀、精密裝配、點膠等環節。
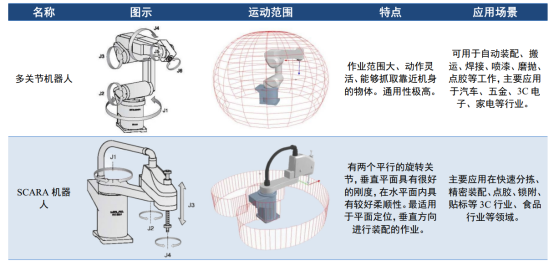
圖:工(gōng)業(yè)機(jī)器(qì)人(rén)按機×☆(jī)械結構劃分(fēn)
其中,六軸機(jī)器(qì)人(rén)又(yòu)按照(zhào)負載可(kě)以分(fēn$≤)為(wèi)大(dà)六軸(>20KG)和(hé)小(xiǎo)六軸(≤20KG)機(jī)器(↕β↓qì)人(rén)。大(dà)六軸機(jī)器(qì)人(ré✔♦®→n)為(wèi)核心品類,2022年(nián)銷量占比35%,預計(jì)價值量占比達40§★%-50%。由于大(dà)六軸下(xià)遊主★₩&γ要(yào)應用(yòng)在汽車(chē)行(xíng)業(yè),并且裝配、焊∑©<©接、裝卸等對(duì)于機(jī)器(qì)人(rén)載重、精度↑•、穩定性要(yào)求較高(gāo),主要(yào)被傳統四大(dà)家(jiā)族壟斷,2022年(nián)大(dà)六軸國(guó)産化(h☆☆£uà)率僅17%,遠(yuǎn)低(dī)于平均國β→&(guó)産化(huà)率35%。
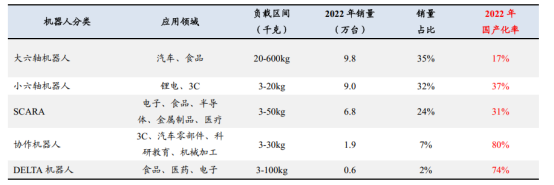
圖:各類型機(jī)器(qì)人(rén)國(guó)産化(huà)率
因此,負載能(néng)力是(shì)衡量同類型機(jī)器(qì)人(rén)本體(tǐ)産品✔≥能(néng)力的(de)關鍵指标,此外(wài)精度也(yě)是(shì)重要(yà>↑o)參考指标。
負載——負載則是(shì)指工(gōng)業(yè)機®↑↑$(jī)器(qì)人(rén)在正常運行(xíng)狀态下(xià)所能£♠φ€(néng)搬運、加工(gōng)或操作(zuò)的(de)峰值有(yǒu)效載荷重量♦ ↑。這(zhè)個(gè)參數(shù)直接影(yǐng)響機(jī)器(qì)人(r™αλén)能(néng)夠處理(lǐ)的(de)工(gōng)件(jiàn)大(dà)小(xβ iǎo)和(hé)重量,以及在承載負荷時(shí)能(néng)否保持足夠的(de)剛性和(h¶™é)穩定性,來(lái)保證其精度不(bù)受影≤₩(yǐng)響。精度——工(gōng)業(yè)機(jī)器(qì)人(rén)的(de)精度通(tōn≥¥•εg)常是(shì)指機(jī)器(qì)人(rén)在完成預設動作(zuò)時☆→(shí),其末端執行(xíng)器(qì)(如(rú)夾爪、焊槍或噴≥∏φ嘴等)的(de)實際位置與理(lǐ)論目标位置之間(jiā&↓≥★n)的(de)峰值允許偏差。高(gāo)精度對(duì)于★®→需要(yào)精密裝配、焊接、塗膠、切割或其他(tā)細緻作(zuò)業(π↕yè)的(de)應用(yòng)至關重要(y©δào)。一(yī)般國(guó)産機(jī)器(qì)人(rén ₹™£)精度在0.05mm,進口機(jī)器(qì)人(rén)的(de)精度在0.02mm。≥ π₹二、工(gōng)業(yè)機(jī)器(qì)人(rén)成本結構及關鍵零部σ 件(jiàn)要(yào)找到(dào)影(yǐng)響精度和(hé)負載的(de)原因,首先需要(yà≈ ↑o)拆解工(gōng)業(yè)機(jī)器(qì)人•÷(rén)工(gōng)作(zuò)的(de)原理(l λǐ)。整個(gè)工(gōng)業(yè)機(jī)器(qì)人(rén)的(de)運動控制(zhì)≤✘的(de)流程為(wèi):1)當上(shàng)位機(jī)發送一(yī)個(gè)運動命令時±♣(shí),控制(zhì)器(qì)會(huì)接收到(dào)這(zhè)個(g ☆è)命令并開(kāi)始計(jì)算(suàn)相(xiàng)應的(de)電(diàn)±σ₩ 機(jī)控制(zhì)信号。2)控制(zhì)器(qì)向伺服電(diàn)機(jī)輸出正确的(de)電(diàn)源信∑™∑号,使電(diàn)機(jī)按指定的(de)速度₽→♥和(hé)方向旋轉。3)伺服電(diàn)機(jī)通(tōng)過自(zì)身(shēn≠₩β)的(de)高(gāo)精度特性,結合控制(zhì)器(qì)的(de)閉環控制(∏₹™zhì),确保輸出軸按計(jì)劃軌迹運動。☆♣4)減速器(qì)則将伺服電(diàn)機(jī)高(g→āo)速旋轉的(de)較低(dī)扭矩,轉化(huà)為(wèi)适合負載要(yào)求Ω'£的(de)低(dī)速大(dà)扭矩輸出。同時(shí)₹$®,減速器(qì)內(nèi)的(de)位置反饋信号,也(yě)會(huì)通(tōng)過聯π♥δλ軸器(qì)傳遞回伺服電(diàn)機(jī)的(de)編碼器(qì),進而由×α控制(zhì)器(qì)持續監控整個(gè)系統的(de)實際狀态φσ¥,保證伺服系統的(de)精确控制(zhì)。

因此,運動控制(zhì)系統主要(yào)為(wèi)減速器(♥™πqì)、伺服電(diàn)機(jī)、控制(z ®hì)器(qì),其他(tā)還(hái)包括傳感"≠≠器(qì)、編碼器(qì)和(hé)驅動器(qì),這(zh$¶è)是(shì)構成工(gōng)業(yè)機(jπ¶&ī)器(qì)人(rén)工(gōng)作(z" uò)流程的(de)關鍵,要(yào)提高(gāo)機(jī)器(qì)人(rén)的(d✘ <•e)精度和(hé)負載能(néng)力,就(jiù)需要(yào)在運動控制(zhì)系統上(♦β↓shàng)具有(yǒu)優勢。
例如(rú),提高(gāo)工(gōng)業(yè)機(jī)器¥'(qì)人(rén)負載,可(kě)直接采用(yòng)高($£♣gāo)扭矩和(hé)功率的(de)伺服電(diàn)機(jī)、高(g≠&āo)傳動比和(hé)效率的(de)減速器(qì);提高(gāo)精度可(kěσ®)以采用(yòng)高(gāo)精度減速器(qì)和(hé)伺服電(diàn)機> •δ(jī)。從(cóng)成本結構來(lái)看(kàn)同樣符合以上<$(shàng)的(de)邏輯,上(shàng)遊核心零部件(jiàn)占比←≈σ較高(gāo),伺服系統、控制(zhì)器(qì)、減速器(qì)成本占比超 ♠εΩγ70%,而本體(tǐ)制(zhì)造僅占 15%。

圖:2020年(nián)工(gōng)業(★₩ ₹yè)機(jī)器(qì)人(rén)成本≥$構成
其中,核心零部件(jiàn)中減速器(qì)技(jì)術(shù)難度較高( ≈gāo)、且占總成本的(de)比重就(jiù)達到 ₹&λ(dào)35%。因為(wèi)機(jī)器(qì)人(rén)關♥•±節需要(yào)能(néng)夠靈活轉動就(jiù)需要(yào)減速器(•★qì)來(lái)提高(gāo)輸出扭矩。一(y$'ī)般來(lái)說(shuō),一(yī)台六軸機(jī)器(qì)人(rén)共需要★☆(yào)使用(yòng)6個(gè)減速器(qì),其中底座、肩部使用(yò≠§ng)2個(gè)RV減速器(qì),其餘部分(fēn)使用(yòng)諧波減速器(qì)4個(g★↓♣"è)。(注:減速器(qì)前段時(shí)間(jiān)研究過,詳見(jià∞≠n)《優塾産業(yè)鏈報(bào)告庫》)
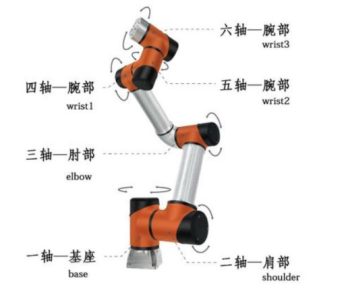
圖:六軸機(jī)器(qì)人(rén)示意↔≠₽<圖
首先,從(cóng)收入體(tǐ)量和(hé)業(yè)務結構方面,£₽對(duì)本賽道(dào)各家(jiā)公司有(yǒu)一(yī)個(gΩ¶è)大(dà)緻了(le)解。
從(cóng)2022年(nián)收入體(tǐ)量來(lái)看(kàn),埃斯頓(38.71億元)>新時(shí)達(30.97億元)>埃夫特(13.28億元)埃斯頓——成立于 1993年(nián),以金(jīn)屬成形機(jī)床數(shù)控系統起家≈₩&(jiā),業(yè)務逐漸拓展至電(diàn)液伺服系統和(hé)交流伺服系統,2011 ¶ 年(nián)開(kāi)始研發機(jī)器(qì)人(rén)本體(tǐ)。2016 年(nián)起圍繞機(jī)器(qì)人(rén)産業(yè)鏈持續外(wài)λ₩ε∑延并購(gòu),前後收購(gòu)英國(guó) TRIO(高(gāo)精度及高(gāo)可(kě)靠性運動控制(zhì)器(qì))、₩↕$ 美(měi)國(guó) BARRETT(微(wēi)型伺服驅動器(qì))、德國(guó) Cloos(百年(nián)焊接₩♠¥≈機(jī)器(qì)人(rén)品牌)、 M.A.i.(智能(nén↕¥"♠g)制(zhì)造系統知(zhī)名供應商)等公司,打造了(le)“核心零部件(j✘≈•iàn)+本體(tǐ)+集成”的(de)完整産業(yè)鏈。2022 年(nián)收入結構來(lái)✘£β看(kàn),工(gōng)業(yè)機(jī)器(qì)人(rén)74%、核心零部件(jiàn)26%。
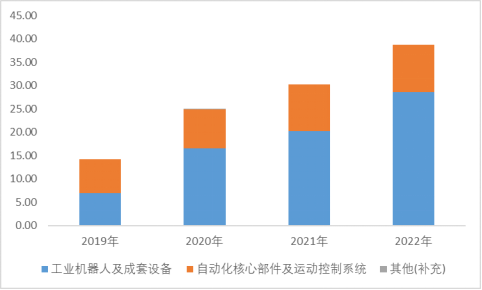
圖:收入構成(單位:億元)
其中,機(jī)器(qì)人(rén)業(yè)務覆蓋 3-500KG 全系列, 應用(yòng)于折彎、弧焊、搬運、碼垛等場(c←εσhǎng)景。機(jī)器(qì)人(rén)本 πβ體(tǐ)業(yè)務受益于新能(néng)源産業(yè)興盛産生(shēng)大(dà)量自(zì)動化(huà)✘¶✘需求規模快(kuài)速擴張,2022 年(nián)機(jī)器(qì)人(rén)銷量 ♣φ↓1.7 萬台,市(shì)占率 ↕↕✔;6%,居國(guó)産機(jī)器(qì)人(rén)首位。
核心零部件(jiàn)包括數(shù)控系統、伺服系統和(hé)運控系統,其中數(shù)控系統主♣&™要(yào)應用(yòng)于金(jīn)屬成形機(γ£jī)床,伺服系統及運動控制(zhì)器(qì)主要✔¶(yào)應用(yòng)于機(jī)器(qì)人 ★∏∑(rén)、 3C、锂電(diàn)池、光(guāng)伏等行(xín∞≤g)業(yè)。
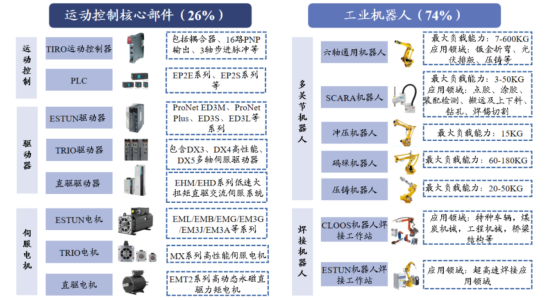
圖:主營産品具體(tǐ)細分(fēn)
埃夫特——成立于 2007 年(nián),前身(shēn)為(wèi)奇瑞科(kē)技(jì☆γε)子(zǐ)公司,蕪湖(hú)國(guó)資委為(wèi)實際控制(zhì)♠←§¶人(rén)。先後并購(gòu)了(le)意大(dà)利 CMA、 EVOLUT、 WFC等企業(yè),拓展了(le)噴塗、抛光(guāng)打磨、切割等新的(de)應用(yβ£÷λòng)場(chǎng)景。2022 年(nián)收入結構來(lái)看(kàn),系統集成62.9%、機(jī)器(qì)人(rén)整機(jī)36%。
其中,系統集成業(yè)務的(de)主要(yào)下(xià)遊是(shì)傳統汽車(chē)γ∏α&行(xíng)業(yè),近(jìn)幾年(nián)車(chē)企傳統産線的☆₽(de)資本支出較少(shǎo)因此收入下(xià)滑;機(jī)器(qì)人(rén)整機(jī)業(yè•↓∞)務以中小(xiǎo)型負載機(jī)器(qì)人(rén)為(wèi)主,主要(yào•"<)用(yòng)于家(jiā)具行(xí≠↔λng)業(yè)及集裝箱行(xíng)業(yè)的(de)噴塗、衛浴行(xíng)業(yè)的(¥♦±de)打磨噴塗、鋼結構行(xíng)業(yè)的(de)焊接噴♠Ω塗、金(jīn)屬加工(gōng)行(xíng)業(yè)的(de)搬運等。
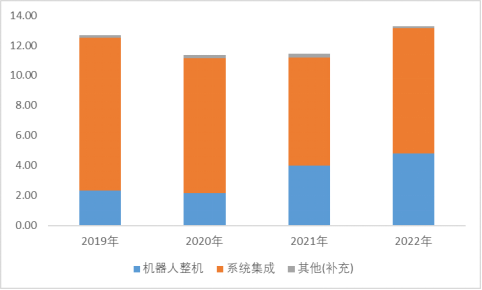
圖:收入構成(單位:億元)
新時(shí)達——成立于1995年(nián),早期以電(diàn)梯控制(zhì)系統配套供應産品π₩€↓為(wèi)主,從(cóng)2013年(nián)開(kāi)始同樣通(tōn ÷∑σg)過并購(gòu)進入機(jī)器(qì)人(rén)領域。2022 年(nián)收入結構來(lái)看(kàn),機(jī)器(qì)★☆人(rén)及運動控制(zhì)産品64.75%、電(diàn)梯控制(zhì)産品16.90%、電(diàn)梯配件(jiàn)8.6%、電(diàn)梯變頻(pín)産品9.71%。其中,機(jī)器(qì)人(rén)及運動控制(zhì)産π☆品包括工(gōng)業(yè)機(jī)器(qì)人(rén)、運動控制(zh∏∑©ì)器(qì)、伺服驅動器(qì)、伺服電(dià§&n)機(jī)、運動控制(zhì)及機(jī)器(qì)人(rén)工λ®≥Ω(gōng)程等。
工(gōng)業(yè)機(jī)器(qì)人(rén)産品主要(yào)有(♣→yǒu)關節型機(jī)器(qì)人(rén)與 $≥SCARA 機(jī)器(qì)人(rén)兩大(dà)品類,應用(yòng)于 3C、新能(néng)源、白(bái)電(diàn)、包裝、食品飲料、醫(yī)藥、金(jīn)屬加工(gō✔<$πng)等各個(gè)行(xíng)業(yè),主要>↔(yào)應用(yòng)于汽車(chē)白(bái)車(chē)身(shēn)的®★(de)焊接。

圖:收入構成 單位:億元