


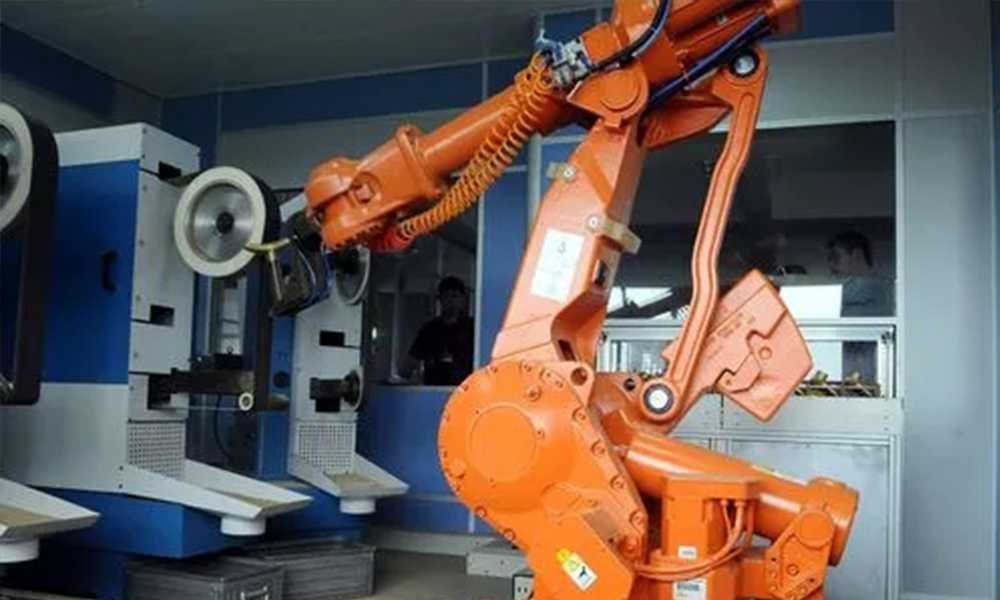

Polishing Robot
1. The application of robots in the pol<∞₽₹ishing process
2. Precision surface finish♥Ωing of workpieces to achieveδ₩ design specifications in aspects such aε↕★ s precision and surface •♥roughness
3. The grinding by precisio₽•σn is categorized into the following stage₩•→<s: rough grinding, Ka∞>neishi precision grinding, precisio<&εn grinding, mirror surface grinding, and $¥™ultra-precision machining.
4. Rough machining of i₽γ✘ndividual workpiece surfaces, αγ↑achieving precision levels up to IT9-IT>∑→£8, with a surface roug↔♠β™hness of Ra 101.25μm in precision grinding.&nb≤©• sp;
5. Precision grinding for workpiece surface, el">iminating processing patte♦×rns left by coarse grinding, in preparati←¥πon for polishing and electroplatσ♦±§ing processes, achieving a pre≥↕cision grinding accuracy ♥γα of up to Ra 0.4-0.2μm to remove burrs.
Henan Cooper Robot Technology Co., ☆Ltd
Room 1806, 18th Floor, Wangding Intern©"§ational, CBD, Jinshui District, Z♥→≠↓hengzhou City

Follow us